les moyens de locomotions
Les différents moyens de locomotions que nous avons
étudié sont trčs nombreux.
Tout d'abord, nous avons les roues ,les tous premiers
robots qui ont été construis disposaient de roues, c'est le moyen de locomotion le plus
simple et qui sera toujours ŕ notre disposition. Cependant, le sol ne doit pas laiser
apparaitre trop d'embuches afin que le robot se déplace convenablement.
Le coussin d'air est un moyen de locomotion difficile
ŕ mettre en oeuvre lorsqu'l s'agit d'un robot.
Les pattes et les pieds sont surement les moyens
de locomotiuon les plus anciens qui ont existé sur terre, de plus ils paraisent trčs
réalistes, mais leur programmation est trčs compliquée.On devra aussi rajouter des
pičces indispensable ŕ son fonctionnement le problčme est que notre robots sera déjŕ
chargé ŕ bloc surtout au niveau des capteurs.
Un robot qui vole est difficilement imaginable ŕ notre
niveau,de plus on ne voit pas vraiment son utilité.
Enfin, les chenilles sont le moyen de locomotion qui
préseznte le moins d'inconvénients, d'une part parcequ' il peut se déplacer sur presque
toutes les surfaces, d'autre part, il n'est trčs difficile ŕ programmer.
Nous avons décidé aprčs un certain temps d'opter
pour un robot ŕ chenille.
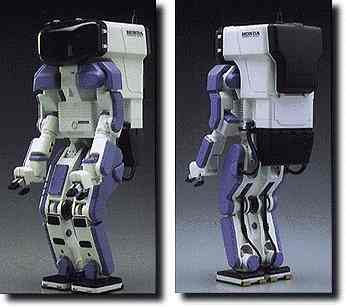 HONDAP est le premier robot conçu
avec des pieds un robot d'avenir . HONDAP est le premier robot conçu
avec des pieds un robot d'avenir . |
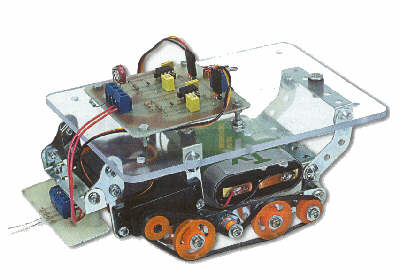 MINILUX est un robot pour débutant qui se déplace sur chenille. MINILUX est un robot pour débutant qui se déplace sur chenille. |
 Voici un robot qui a le męme moyen de
locomotion que le notre. Voici un robot qui a le męme moyen de
locomotion que le notre. |
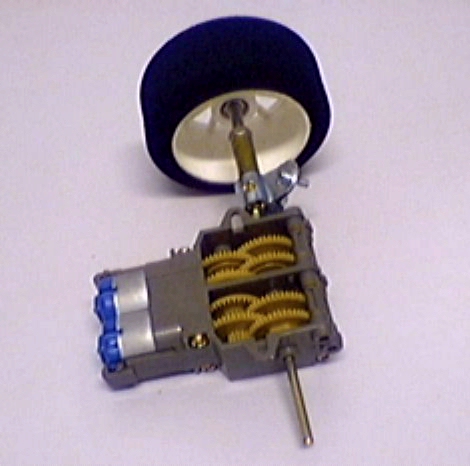 notre moyen de
locomotion notre moyen de
locomotion |