|
|
|
|
|
|
Les différents types de capteurs
Afin que notre robot puisse se repérer et se déplacer convenablement dans un espace donné, nous avons décidé de l'équipé par un maximum de capteur.En effet un robot qui reste coincé face ŕ un obstacle n'est pas digne de l'appelation de robot.
Pour remédier ŕ ce problčme majeur, nous avons donc décidé de placer 5 capteurs de type détection d'obstacle dont un sera placé devant, 2 autres ŕ droite et ŕ gauche et enfin un capteur ŕ l'arričre et un au-dessus( pour que notre robot puisse savoir s'il peut passer ou non sous un obstacle.
A l'avant nous allons mettre aussi un capteur ŕ ultra-son pour détecter les mouvements d'une personne et ainsi de pouvoir la suivre .
Nous allons lui implanter un capteur de lumičre pour qu'il puisse ,si on le programme, de s'orienter vers la lumičre du jour .
Notre robot, aprčs programmation et installation au préalable, pourra détecter un fil métallique ou une bande de couleur qui délimitera son champ d'action.
Au cas ou l' un de ses capteur ne fonctionnerait pas correctement, notre robot sera équipé d'un détecteur de vibration qui lui permettra de s'arręter et d'analyser la situation dans laquelle il se trouve;et de décider de ce qu'il doit faire.
|
|
|
|
|
|
 capteur différentiel (qui sert ŕ repérer des obstacle qui délimitent
le champ d' action.)
capteur différentiel (qui sert ŕ repérer des obstacle qui délimitent
le champ d' action.)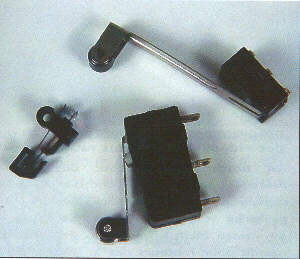 différent
types de capteurs
différent
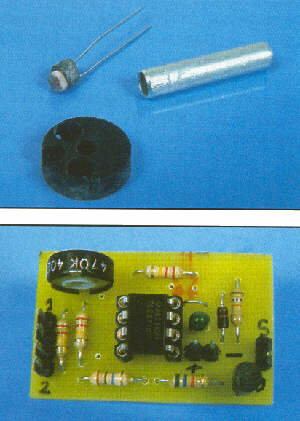
types de capteurs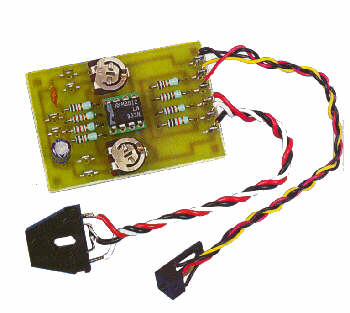 Voici un capteur détecteur d'obstacle.
Voici un capteur détecteur d'obstacle. Voici un capteur de type moustache optique
Voici un capteur de type moustache optique