Charly-mécanique
Cette partie est destinée à vous faire comprendre le fonctionnement mécanique du Charly.
I/Le moteur pas à pas
Le moteur du Charlyrobot est un moteur pas à pas. Le contrôle de ce moteur
ce fait par impulsion électrique, à chaque impulsion le moteur tournera d'un pas d'ou le
nom de moteur pas à pas. Dans le cas de notre charlyrobot, qui possède un moteur 200 pas
(ou 400 demi-pas), il faudra envoyer 200 impulsions pour avoir un tour moteur. On parle
aussi du pas moteur : c'est la valeur angulaire de déplacement d'un moteur pas à pas
(200 pas correspondent à 1.8° de déplacement).Grâce à ce moteur, on pourra connaître
la position angulaire exacte sans avoir recours à un capteur dans le moteur. Ceci
permettra une meilleure précision pour les usinages.
II/ Le pas de la vis
Le moteur pas à pas du Charly est constitué d'un stator et d'un rotor. Le
stator est la partie fixe du moteur, le rotor est la partie mobile qui entraîne une vis
de déplacement. Un tour moteur correspond au pas de la vis ; ce pas correspond au
déplacement qu'effectura le chariot. Un pas de vis de 5 mm fera avancer le chariot de 5
mm. Exemple : 400 demi pas correspond à 1 tour moteur qui correspond à 1 déplacement de
5mm.
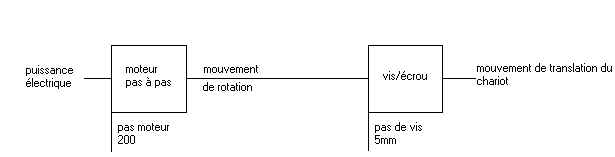
III/ Schéma synoptique
Un schéma synoptique pernet de retracer les
différentes étapes nécessaire au déplacement d'un axe.On y retrouve les différentes
caractéristiques de chaque étape.
IV/ Schéma cinématique
Un schéma cinématique permet de visualiser toutes les
liaisons présentes dans un système, il nous permet de comprendre facilement les
différents mouvements que peuvent faire les pièce les unes par rapport aux autres. Nous
allons à présent réaliser le schéma cinématique d'un axe.
 |
MODULE DE TRANSLATION
Le rotor du moteur induit un mouvement de rotation à la vis, ce mouvement est représenté par une liaison pivot (1). La vis transmet ensuite ce mouvement à l'écrou par une liaison hélicoidale (2). L'axe (le chariot), étant monté sur l'écrou, est entrainé, et fait ainsi un mouvement de translation par rapport au bâti ; ce mouvement est modélisé par une glissière(3).