|
|
|
Le servomoteur :
On a du supprimé l’ergot sur le servomoteur pour nous permettre d’utiliser le servomoteur comme un moteur libre.
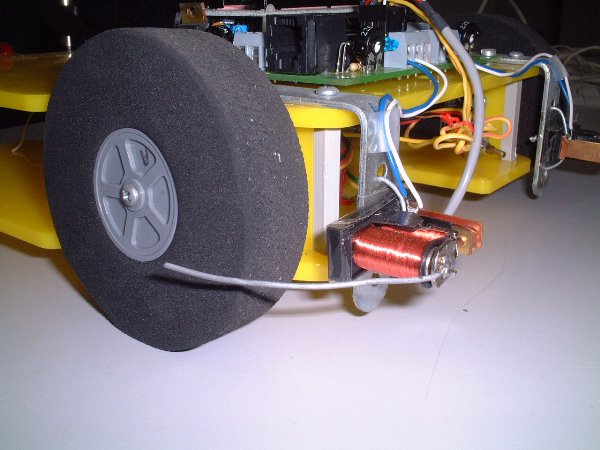
Les relais : On a utilisé des relais pour faire des capteurs. Nous nous sommes donc servis du différent matériels du lycée pour effectuer notre travail. Le relais est en fait servis comme interrupteur pour détecter un obstacle. Nous nous sommes également rendus compte que les infrarouges ne fonctionnait pas s’ils rencontraient un obstacle noirs !!! ( les infrarouges sont absorbés par le noir )
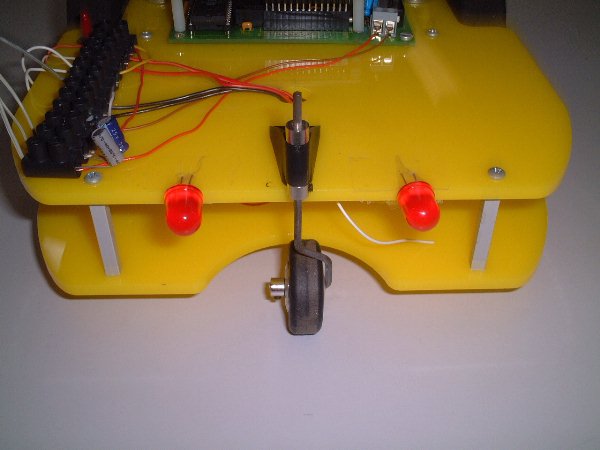
Les diodes les diodes ont été servis pour nous permettre de visualiser que le robot rencontrait un obstacle et aussi pour informer l’utilisateur du fonctionnement du robot !
© By Gilles |