Pièces réalisées sous solidworks:
Ceci est un servomoteur, il permettra de faire pivoter l'axe des directions, afin de faire tourner l'AROBOT.
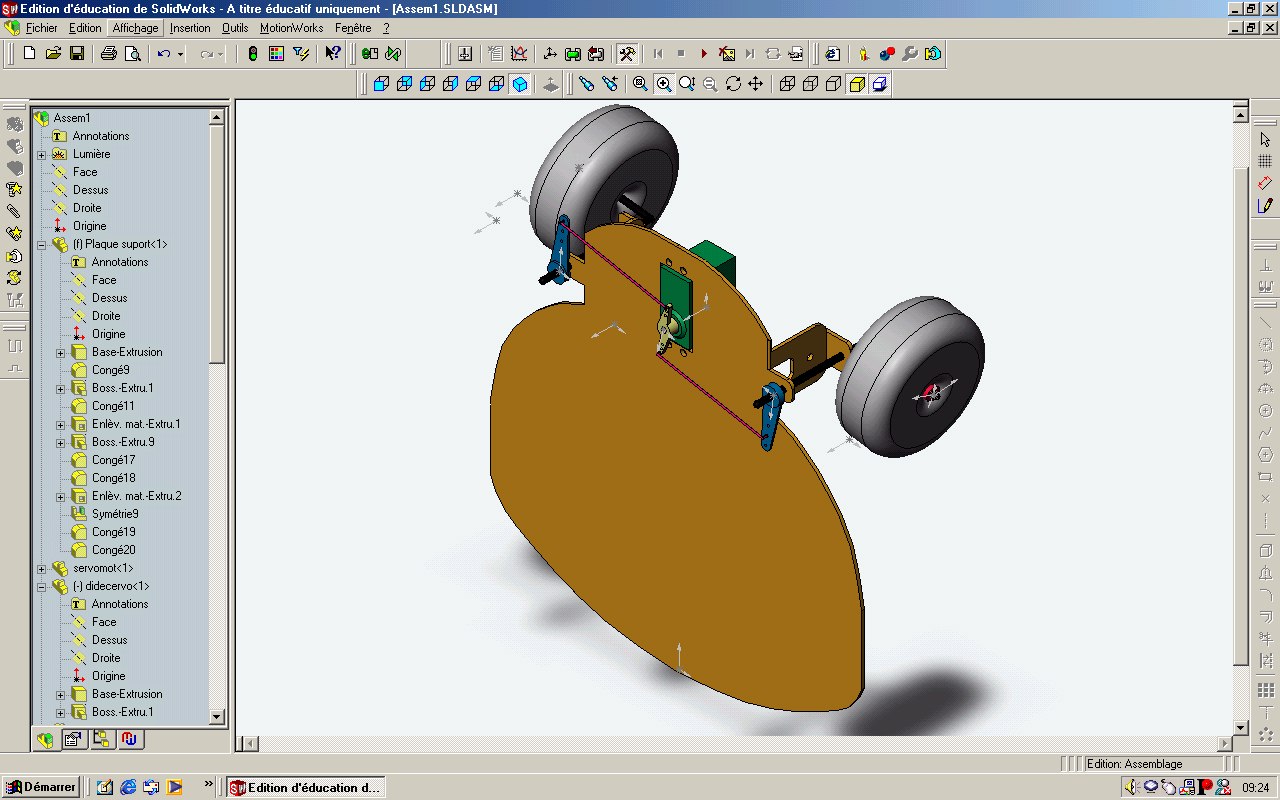
Modélisation de l'Arobot sous SolidWork (ci-dessus)
Mesure de l'angle de braquage avec SolidWorks.
Valeur maxi = 24.58 degrés