Positionnement d'un robot dans l'espace :
Nous
avons réfléchi sur la mise en oeuvre d'une technique pour
connaître la position (X,Y) d'un robot sur une zone délimitée (environ 3m*3m) .
Le principe que nous allons tenter de mettre en oeuvre est la
triangulation . L'idée de base est de connaître la distance du robot
par rapport à 2 balises et d'en déduire
la position du robot (X,Y), connaissant la distance entre deux balises.
La mesure va se faire par ultrason (émetteur 40khz ), avec un top synchro HF .
On espère pouvoir ainsi afficher en temps réel la position d'un robot sur le PC.
Les premiers tests ont eu lieu avec des émetteurs/récepteurs
d'un projet précédent . On émet des trains d'impulsions de 40khz (train
de largeur 500µs ) La démodulation du signal émis est bonne
et une petite porte logique trigger devrait nous fournir un beau signal
carré..
-
(1) d1^2 = x1^2 + y1^2
(2) d2^2 = (a-x1)^2 + y1^2 (car h = y1 )
On développe l'équation 2 :
(2) <=> d2^2 = a^2 + X1^2 - 2aX1 + Y1^2
dans l'équation (2) , on peut remplacer (X1^2 + Y1^2) par d1^2
d'où :
d2^2 = a^2 - 2aX1 + d1^2
D'où :
X1 = (d1^2 - d2^2 + a^2)/(2a)
Y1 = srq(abs(d1^2 - x1^2)) (sqr = racine carré et abs = valeur absolue)
-
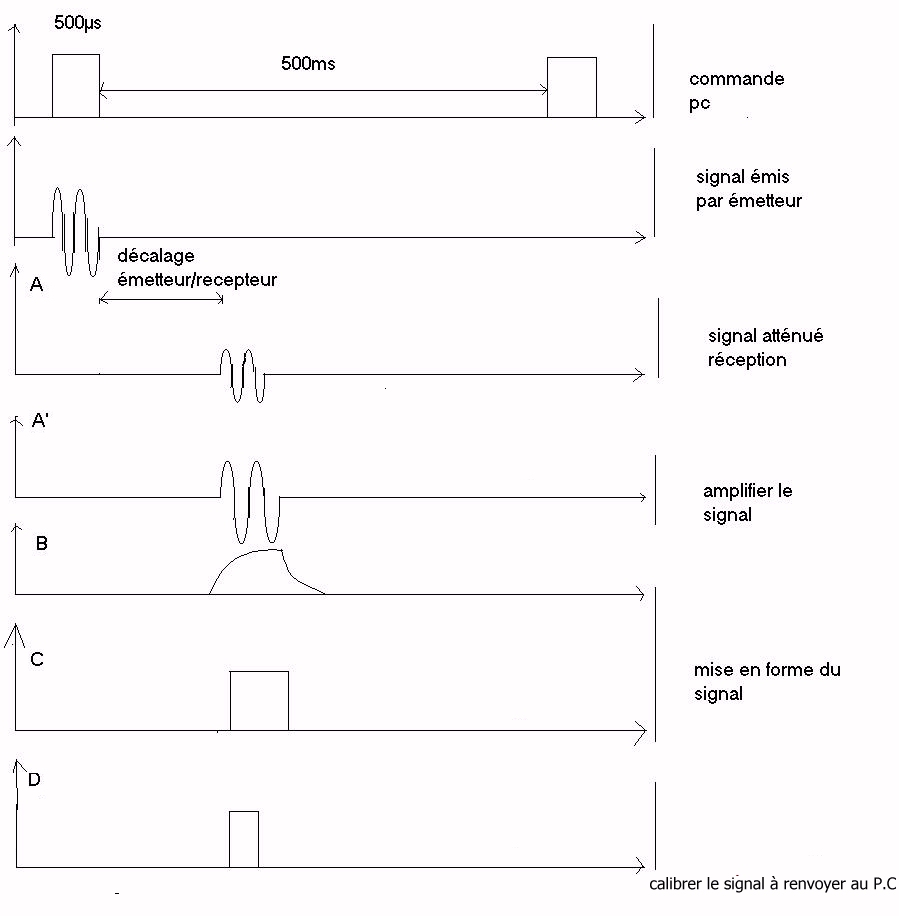
Afin de pouvoir comprendre le
fonctionnement global de notre système,le chronogramme précédent nous est très
utile.
le principe est simple, le PC ordonne
à l'émetteur d'émettre un signal et puis le signal est reçu par le
récepteur qui va le mettre en forme et le calibrer. le programme que nous avons
effectué nous permet donc de savoir le temps entre l'émission et la
réception(via à un compteur) et ainsi donc par l'intermédiaire d'un calcul
toujours effectué par le programme,la distance d entre l'émetteur (robot) et le
récepteur est déterminé...
page suivante