|
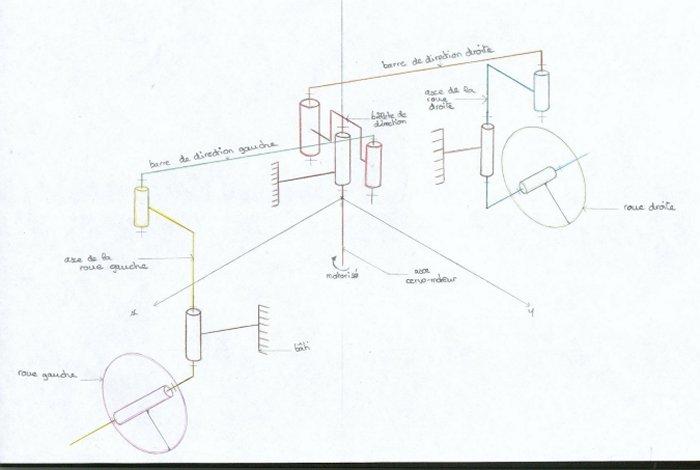
Après avoir fini le montage du robot, nous pouvons entamer la partie mécanique de notre projet . Pour commencer cette partie nous vous présentons le schéma fonctionnel du robot: Ainsi que le graphe des liaisons regroupant tous les ensemble cinématique présent dans l'AROBOT.
Ce graphe de liaison nous permet de réaliser dans un deuxième temps le schéma cinématique de la direction de l'Arobot (que voici ci-dessous):
Après avoir fini cette première partie de l' étude mécanique, nous pouvons commencer a modéliser les pièces du robot et de les assembler pour modéliser le robot entier et commencer l'étude de la direction et des vitesse de ce robot. Nous avons commencé à modéliser le robot pièce par pièce .Voici la modélisation de chaque pièces qui composent la direction de notre engin. La roue: L'axe de la roue:
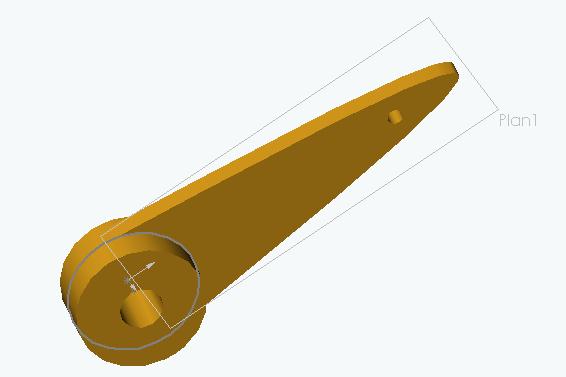
L'écrou : La biellette de l'axe de la roue:
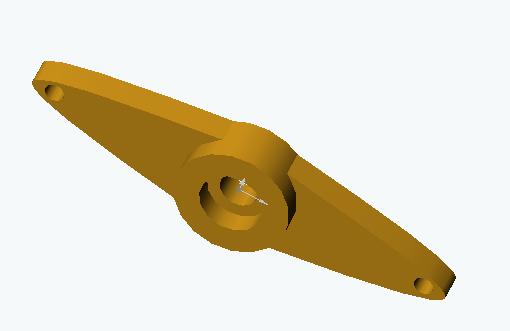
La biellette du servo moteur : La barette entre la biellette roue et la biellette servo-moteur :
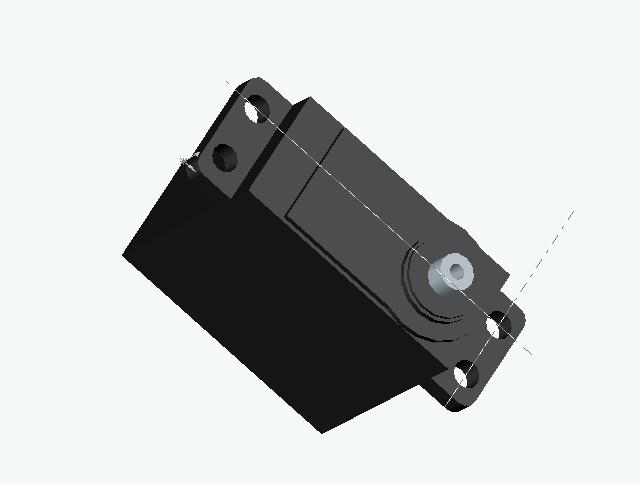
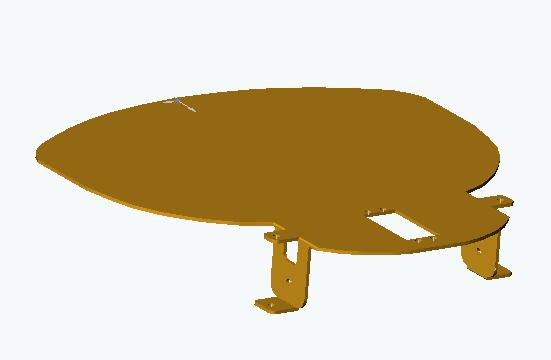
Le servo-moteur: La plaque support:
Puis après quelques modification de couleur et un assemble de toutes ces pièces, on obtient la modélisation complète de notre robot.
|