
http://louispayen.apinc.org/
LE LYCEE
LOUIS PAYEN PRESENTE :
Le
Robot RLP 2000
Réalisation
:
Classe
de 1ère S . SI du Lycée Louis Payen
(ile de La Réunion)
Remerciements à Mme Michel, Proviseur du Lycée Louis Payen pour
son soutien au projet, ainsi
qu'à M. et Mme Hénaff (parents d'élève) pour leur aide
logistique lors de l'exposcience.
 |
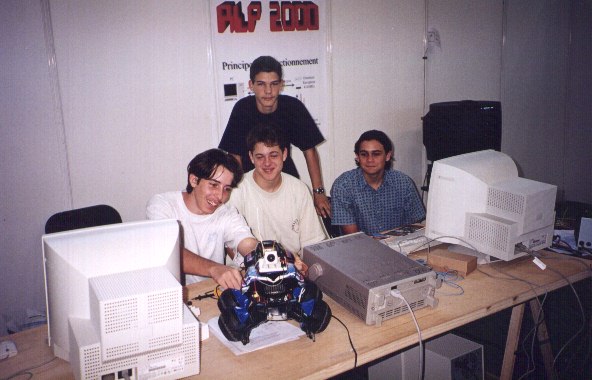
Les participants de
l'exposcience 2000 (de gauche à droite ): Henaff
Eric |
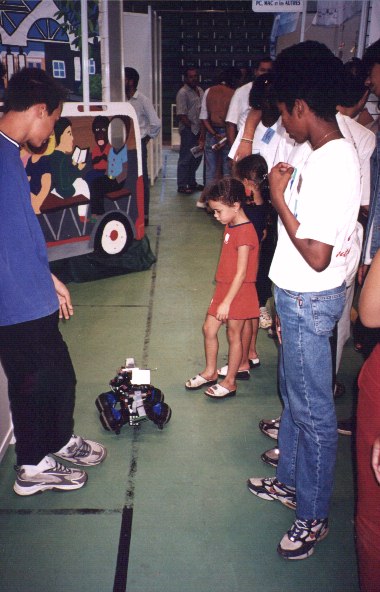
| La voiture est pilotée à
distance par ordinateur . Si elle détecte un'obstacle, elle refuse d'avancer et renvoie l'information au PC. |
 |
 |
 |
| Elle se faufile parmi le public et les stands ... | ... étonnant petits et grands avec son Bip Bip ! |
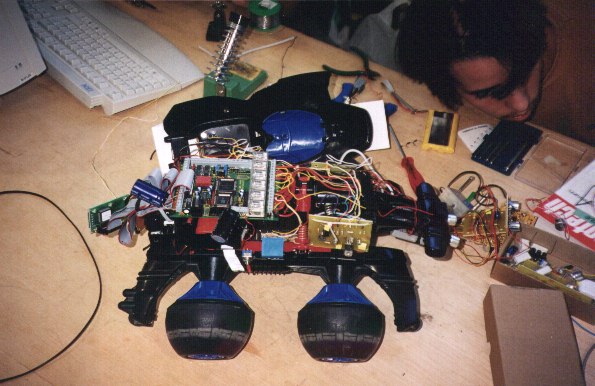 |
La voiture est équipée d'un
controlboy 3 (micro-contrôleur 68HC11 E1) , d'un capteur
à ultra-son à l'avant et un capteur ILS sur une roue) Deux paires d'émetteurs/récepteurs Aurel 434Mzh assure la communication bidirectionnelle avec le PC. Un buzzer pour les Bip-Bip télécommandés ! |
| La programmation du 68HC11 est
faite en basic 11 puis compilé. Coté ordinateur PC, la programmation est faite sous Visual Basic 6. |
 |
 |
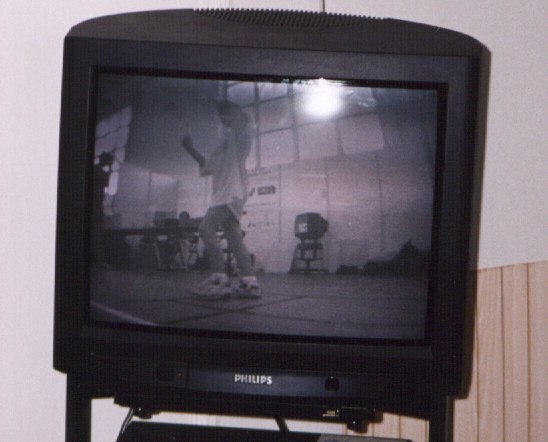
Montée sur la voiture, une caméra N&B ultra miniature avec son émetteur HF permet une réception directement sur un poste de télévision. |
| L'image est en noir et blanc mais
le pilotage de la voiture à travers les stands est
vraiment "fun" et récompense 2 mois de travail
hors temps scolaire d'une petite équipe d'élèves très
motivés ! Note : Le robot peut aussi se déplacer de façon totalement autonome en évitant les obstacles. |
 |
| QUELQUES INFORMATIONS TECHNIQUES |
La motricité est assurée par
deux moteurs à courant continu. Pour faire tourner le
véhicule , il faut inverser la rotation d'un moteur par
rapport à l'autre. Les difficultés
rencontrées : Au final : Brèves de l'exposciences :
|
| PROJET
ENCADRE PAR H B |
25 Juillet 2000