{kind=link}
| ROBOT
EXPLORER COMMANDé PAR LE
PC VIA LE PORT PARALLÈLE Quelques photos de diverses étapes de fabrication |
||
 |
 |
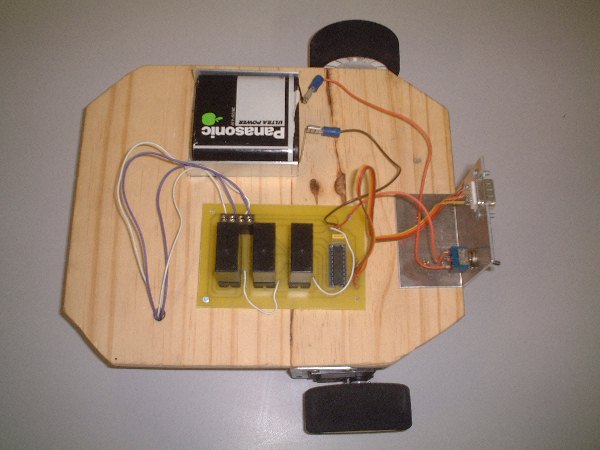 |
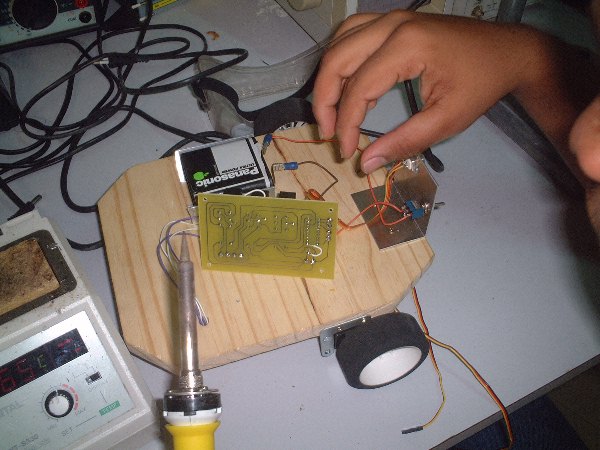
| Fixation des moteurs sur le châssis | Soudage de la carte interface à relais | Un robot vue de dessus |
Les mini projets ISI 2003 - 2004
Les élèves (très motivés!)
travaillent sur 2 types de projets :
(100% Louis Payen)
Le projet "Robot Explorer" : Robot
commandé par ordinateur (liaison filière au port //) . Il faut
réaliser le châssis (en bois) , monter les moteurs, assembler les roues,
souder la carte interface à relais et réaliser toute la connectique
électrique (liaison carte/moteur et carte/PC)
Enfin, dernière étape : la programmation en Qbasic sur PC.
En parallèle, les élèves doivent réaliser la modélisation 3D du robot sur
ordinateur ainsi qu'un petit site web présentant le travail réalisé.
Le projet "Robot Hercule" :
Le projet hercule est assez ambitieux puisque l'objectif final (pour 2006) est
de réaliser un robot de la taille d'un enfant (1m de haut sur une embase de
70*70cm).
Tête pivotante, bras pivotants à base de vérins électriques et pneumatiques,
pinces de saisies, caméras HF pour les yeux, haut parleur dans la bouche,
commande à distance , gestion par microcontrôleurs (faudra au moins 3 cartes
68HC11)
L'embase du robot est constitué de deux trottinettes
électriques assemblées par des barres en acier
L'objectif
cette année est de réaliser l'embase du robot, son squelette et d'étudier
(rechercher) des solutions techniques pour la réalisation de la tête et des
bras. Un véritable travail de bureau d'étude et de conception pour les
ingénieurs en herbe.
Vous avez des questions ? RDV sur le forum de ce site !
| ROBOT
EXPLORER COMMANDé PAR LE
PC VIA LE PORT PARALLÈLE Quelques photos de diverses étapes de fabrication |
||
|
|
|
| Fixation des moteurs sur le châssis | Soudage de la carte interface à relais | Un robot vue de dessus |
 |
 |
 |
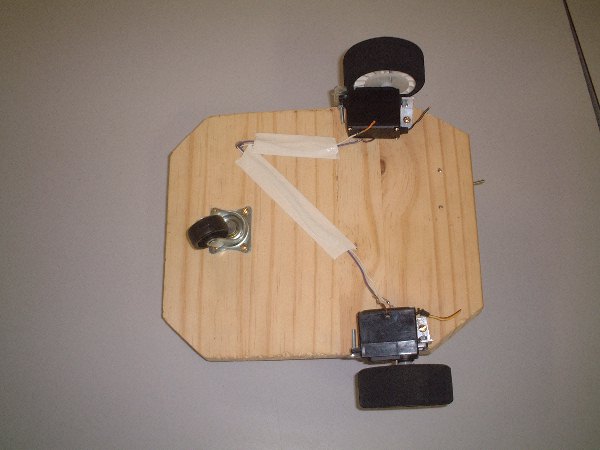
| Robot vue de dessous . Composé d'une roue folle à l'avant et 2 servomoteurs modifiés à l'arrière | Perçage de la carte interface | Réalisation du châssis (forme libre mais avec des petites contraintes à respecter) |
| ROBOT HERCULE : Un gros projet : 1m de haut sur 70*70 de base | ||
 |
 |
 |
| Conception du premier étage (bassin du robot) . | Réalisation de l'épaule | Vue générale du squelette (qui aura plus tard une enveloppe dans laquelle on placera toute la partie commande) |
 |
 |
 |
| Perçage des pièces en acier | Etude de la rotation du bras (principe de l'ouvre portail) | Découpage à la scie à métaux d'un élément du robot |
 |
 |
| Conception du robot en 3D ( sous solidworks ) | |
Les sites web des élèves de seconde ISI 2004:
Les 3 sites élus cette année sur 16 sont
:
Explorer Henry
Hercule team
Peribrahim
Les autres sites ne sont pas publiés car
non respect des consignes (format/taille des fichiers, sous répertoires en
cascade, accent dans les noms ... )