|
Problématique: |
Graphe de liaisonPour une étude de liaison de la partie directionnelle du A-Robot, nous avons énumérés les sous-ensembles de cette partie en nous aidant du système réel de la nomenclature. Nous avons par la suite établis le graphe des liaisons avec MotionWorks.
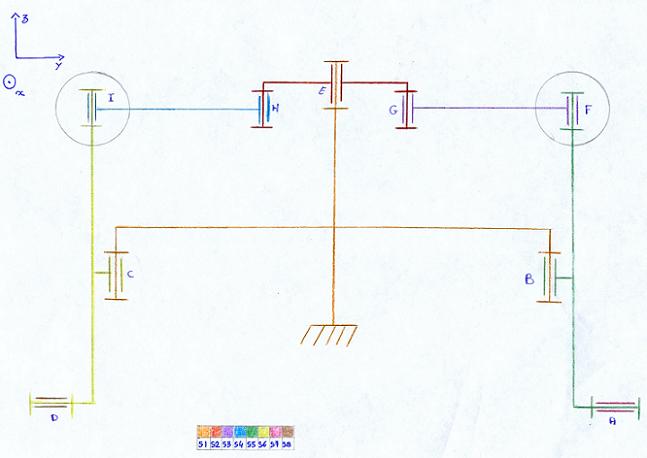
Schéma cinématique de la partie directionnelle.
Nous avons associé entre elles les pièces qui sont en liaison encastrement. En suite, en utilisant la représentation normalisée et en respectant les orientations des liaisons, nous avons réalisé une représentation schématique des liaisons: le schéma cinématique
Pour les centres I et F la modélisation en 2D du A-robot dans le référentiel choisi ne nous permet pas de définir complètement les liaisons du "bras de commande" entre la "tige" et "l'axe arrière". |
|
|
|
Télécharger nos images (GIF) (1.20 Mo) Animation de la partie directionnelle
|
{kind=link}