|
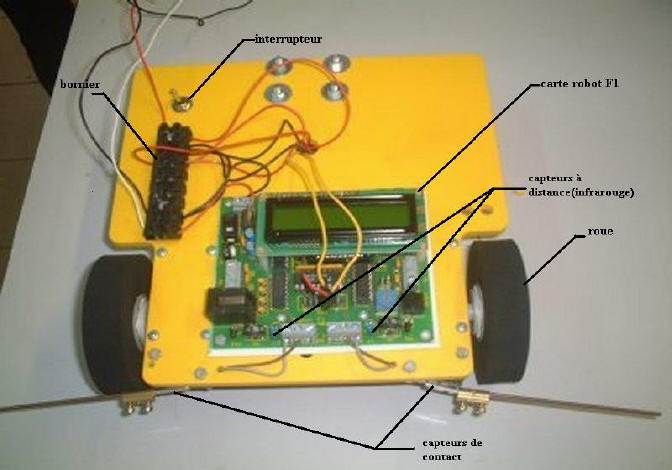
Voici le robot après le cablâge:
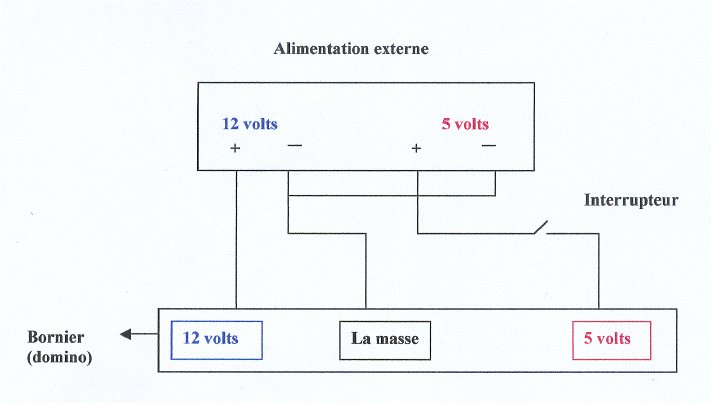
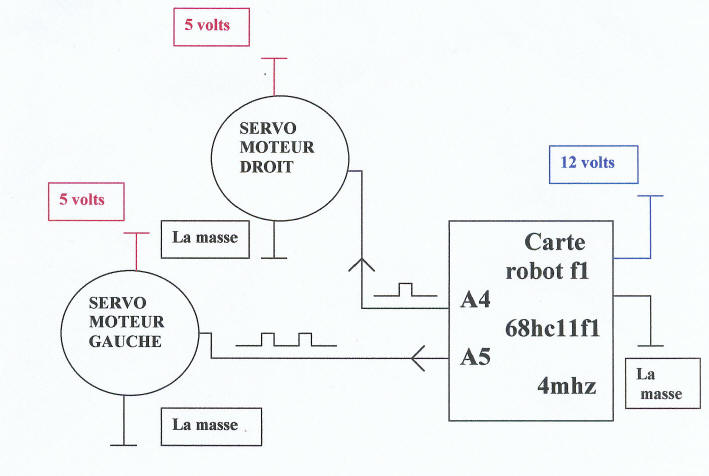
Pour la partie électrique, tout d'abord nous avons réalisé les câblages des capteurs avec la carte mère puis les servos-moteurs reliés aux entrées A4 et A5 de la carte robot f1. Nous avons reliés les servos-moteurs au bornier qu'on a relié à l 'alimentation externe, sans oublier l'interrupteur posé entre l'alimentation et le bornier en 5 volts ( pour activer les servos-moteurs). Il y a un pont entre les masses de 5 volts et de 12 volts. Pour finir ,la carte mère a été relié à la masse et à l'alimentation 12 volts . On a utilisé un fil blanc pour le 12 volts ,des fils rouges pour les 5 volts et des fils noirs pour les masses . Schématisation de l'alimentation :
Câblage des servo moteurs sur la carte mère:
|