|
EUPHRASIE Julie
BIDOIS
Claire
LECLANCHE Loïc
Année scolaire
2003-2004 et 2004-2005
Objectifs et description du
projet :
-
Introduction:
-
Nous allons
vous présenter notre robot : la base 5aakt .Ce robot doit pouvoir
fonctionner et contourner des obstacles en autonomie, pour cela nous avons
construit,modélisé et programmé le robot afin de pouvoir contrôler la
base.
-
Notre robot
se compose de :
-
- deux roues
motrices .
-
-un châssis.
-
-une roue folle
et son support.
-
- deux
servos-moteurs.
-
- 8 piliers .
-
-deux plaques
supports servos-moteurs.
-
-une carte
robot f1.
-
-deux capteurs
de type contact.
-
- un bornier.
-
-un
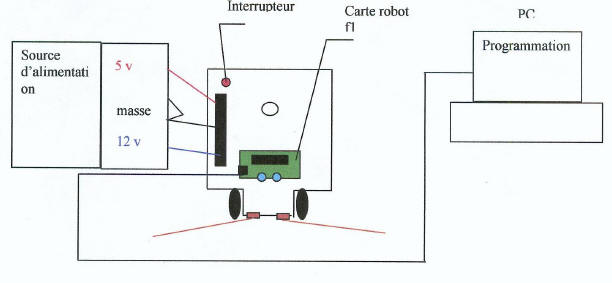
interrupteur.
-
Pour le
fonctionnement du robot il est nécessaire d'avoir un source
d'alimentation.
-
Schéma fonctionnel:
-
-
-
Objectif:
Montage d 'un robot (la base 5AAKT) et programmation du robot pour qu'il
soit autonome c'est-à-dire qu'il pourra avancer et exécuter le programme
.Il doit pouvoir détecter les obstacles de manière à les éviter .
Sommaire
Présentation
du montage (en photos)
Étude
de la partie mécanique
Montage sous Solidworks
Étude
de la partie électronique
Carnet
de bord
|