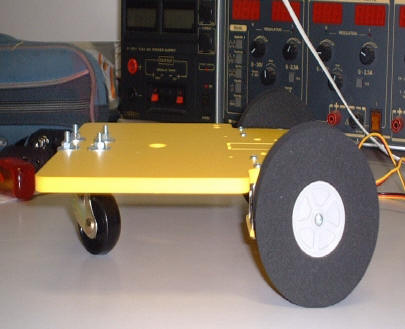
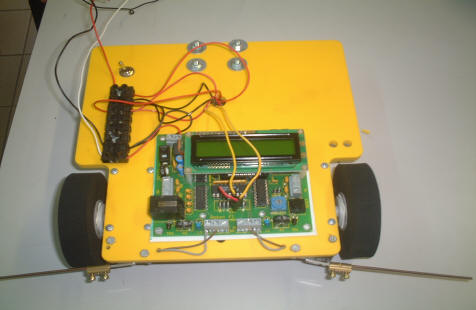
Notre robot peut enfin tenir la route avec la mise en place des roues.
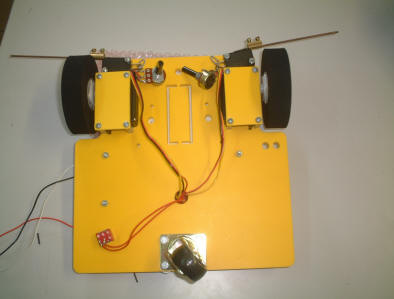
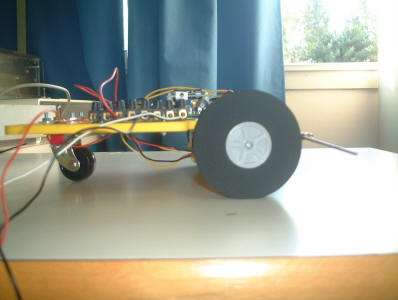
Vue de dessous de la base 5aakt. Vue de côté de la base
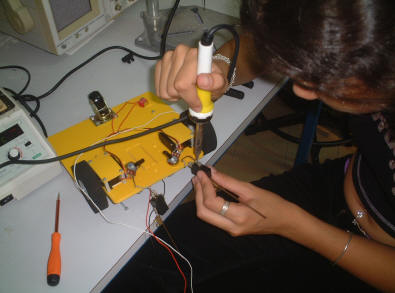
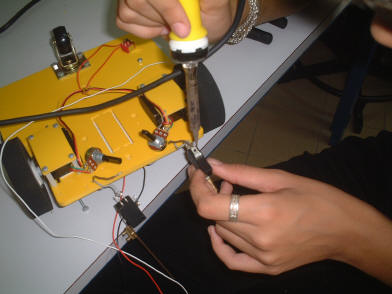
Nous avons effectués la soudure de câbles sur différentes pièces ainsi que sur les capteurs que nous voyons ci-dessus.
Ouff !!! Voici notre base 5aakt enfin montée , nous avons pris du temps avant qu'elle prenne forme mais nous sommes satisfaits du résultat.