PROJETS
EXPOSCIENCES 2002
Robotique et divers
Travaux du mardi PM
- La section S - SI du lycée Louis Payen (ile de La
Réunion) participe à
l'exposciences 2002 . Certains thèmes des TPE seront utilisés pour l'exposciences, à
savoir :
Reprise du projet RLP2000 en y apportant diverses améliorations .
Montage de deux robots "insectes" et deux robots avec roues motrices +
améliorations technologiques.
Affichage multiplexé sur 128 leds (voir plus)
Les problèmes à résoudre et améliorations à faire (en vrac ) :
Robot rlp2000 :
- Améliorer le hacheur (régulateur de vitesse) (commandé par une
interruption du 68HC11 )
- Fiabiliser la commande à distance par PC : on programmera en priorité sous DOS en
qbasic et non sous windows qui génère trop de problèmes pour réaliser du temps réel (
génération des signaux du signal modulant (porteuse étant à 433Mhz - module Aurel) )
- Rajouter des capteurs et renvoyer les infos au PC . A priori, on utilisera un deuxième
émetteur sur une autre fréquence . Ce ne sera pas du Aurel ? Sinon, il faut réfléchir
à un protocole de communication bidirectionnel plus complexe et surtout rapide (attention
au temps de réponse pour l'envoi des ordres : environ 300ms max sinon c'est pas terrible
...)
Robot insecte (stamp bug) et robot arobat (roues motrices) :
- Monter les robots (partie mécanique) et étudier le programme proposé (microcontroleur
basic stamp).
- Améliorations à apporter : Rajouter des capteurs , rajouter une
commande HF pour pilotage à distance par PC.
Pb : 4 robots , il faut donc 4 émetteurs/récepteurs sur des fréquences porteuses
distinctes.
L'idée est donc la suivante : On utilise des émetteurs (bande 27Hz et 40Mhz) du commerce
+ récepteurs. Il faut ensuite réaliser l'interface entre l'émetteur et le PC d'une part
(+ programme de pilotage) et d'autre part décider d'un protocole de communication au
niveau du récepteur . Le récepteur délivre un signal MLI destiné normalement à
piloter un servo moteur. Il faut donc détourner ce signal de sa fonction première en
l'injectant dans une entrée du 68HC11. Le 68HC11 mesure la largeur d'impulsion et décode
le signal émis (on peut transmettre un mot binaire ( 0 - 1) en utilisant 2 largeurs
d'impulsions distinctes.)
- Note importante : le micro-controleur livré avec le robot stamp bug n'est -à
priori- pas suffisamment puissant (mémoire/vitesse/E-S) pour gérer d'autres capteurs et
surtout le programme de communication avec le PC. Moralité : il sera probablement
nécessaire de le remplacer par une carte 68HC11F1 .
Pour l'autre robot (arobat), on envisagera sérieusement un système bi processeur en
rajoutant la carte 68HC11 (nécessite de mettre en place un protocole de communication
minimum entre les processeurs ). La deuxième carte serait utiliser pour
communiquer avec le PC
- Note 2 : Un groupe TPE en terminale travaille aussi sur la commande MLI de servo-moteurs
. Les travaux pourront être réinvestis pour les premières !
Affichage multiplexé :
Mettre en oeuvre un afficheur à led . Commande avec multiplexage . On travaille sous dos
pour limiter les problèmes. Affichage de messages , translation, rotations.
Etudier les avantages, les problèmes et les contraintes du multiplexage.
Amplificateur Audio :
Réaliser un ampli audio avec une mini table de mixage + réglage grave/aigu
(filtrage ) .
ETAT D'AVANCEMENT .
29 septembre 2001
Projet robot stamp :
Les robots bugs sont pratiquement montés (9h de travail). La
version montée fonctionne mais ne correspond pas à la description fournie
(notice de montage et d'achat)!!! En effet , le micro-controleur Stamp 1 a été
remplacée par un micro-controleur PIC .
Heureusement nous avons des stamp 2 disponibles et on devrait pouvoir
changer les puces. L'objectif est de modifier le programme et l'adapter pour une
gestion à distance par PC.
Etudes à faire : analyser les signaux, vérifier la compatibilité des
broches pour changer de micro-controleur (nécessite de rechercher doc du STAMP
sur internet), rajouter liaison avec recepteur radio et faire programme de
gestion.
Difficultés probables : Limiter la masse des composants (on ne pourra
pas utiliser le controlboy f1 , à moins de refaire carrément le robot en plus
gros et costaud...) , utiliser le moins de mémoire possible pour la gestion
radio + commande moteur (sinon, faut utiliser un stamp version plus récente,
mais à commander ) ... et s'approprier la programmation du stamp !
Projet Arobot
Montage tout juste commencé . 3h pour lire la doc et faire l'inventaire. Semble nettement plus solide et capable de supporter une masse plus conséquente que le bug.
Projet RLP2000
Mise en oeuvre du controlboy 3
(68HC11E1) : installation et petit programme de test (clavier; lcd)
Réalisation du câblage (sur papier puis sur cboy3) d'un moteur avec les 2 sens
de rotation et le système de commutation de la puissance. Réalisation du
programme et tests. Le câblage des relais et le programme a nécessité une
extrême vigilance car une erreur dans le séquencement ou le montage peut
entrainer un court-circuit nuisible aux relais du cboy3 ou aux pistes
imprimées. 6h de travail.
Projet Affichage multiplexé
A partir d'un montage, qui avait été
partiellement réalisé par le professeur sur LAB, les élèves ont analysé le
câblage, testé le fonctionnement manuellement et commencé le schéma
structurel global avec la liaison PC. (utilisation du port //)
La matrice de leds est de 8 * 16 (soit 128 leds)
Amplificateur Audio
Explication du principe général de l'amplification (en courant et en tension). Principe du filtrage BF et HF (cellule RC) , fréquence de coupure. Mise en oeuvre d'un AOP monté en amplificateur non-inverseur (Câblage sur lab, alimentation symétrique)
Remarque générale : les élèves débutent en électronique et le travail de démarrage est donc naturellement un peu plus laborieux. Il faudra penser à alterner les groupes de travail pour améliorer le rendement (tout en même temps, c'est chaud !)
26 octobre 2001
Une nouvelle version
"maison" du robot bug est en construction, plus grand et plus puissant
, pour accueillir un microcontroleur 68HC11 (controlboy f1) . On l'appellera le 68HC11
BUG
En parallèle, dans le cadre de son TPE, Fontaine Christophe, élève de
terminale SI réfléchit à la mise en oeuvre d'un algorithme
"maison" (un peu aidé par le prof) pour piloter 8 servo moteurs
(mais 6 seulement seront utilisés) . On devrait aboutir à une solution assez
puissante et économe en terme de mémoire (contrairement à la première
version de l'algorithme). Un servo moteur est un moteur asservi en position et
nécessite l'envoi d'une impulsion entre 1 et 2ms , toutes les 20ms environ. La
largeur de l'impulsion détermine l'angle de rotation de l'axe (en sortie du
réducteur). On utilise une interruption pour gérer les servos en parallèle.
L'idée de Fontaine est de synchroniser l'interruption en externe avec le signal
de réception du récepteur radio, de décoder le signal et piloter les servos
en conséquence. On réfléchit aux divers problèmes qui peuvent se poser. I
31 Octobre 2001
L'algorithme ne sera finalement pas adopté car
microcontroleur trop lent (bouffe trop de temps machine, même si on optimise en
assembleur ). On est amené à simplifier le problème de la façon suivante :
On définie 5 positions pour les servo moteurs (0°, 45°, 90° , 135° et 180°
) . Les moteurs pourront fonctionner par pas de 45° (au lieu de 1° ...) mais
cela n'est pas gênant car en pratique on a pas besoin de plus de précision
pour faire déplacer notre robot. On utilise peu de mémoire et il
restera suffisamment de temps machine pour traiter les autres
informations.
Principe :
Programme d'interruption (externe,
synchronisé sur le récepteur hf)
PORTB = 1
Temporiser 1ms
Pour i=0 to 3
PORTB = T(i)
temporiser 0.25ms
Finpour
PORTB = 0
Fin interruption
| T(0) | T(1) | T(2) | T(3) | T(4) | ANGLE | PortB |
| 1 | 1 | 0 | 0 | 0 | 90 | -->Servo0 |
| 1 | 1 | 1 | 0 | 0 | 135 | -->Servo1 |
| 1 | 1 | 1 | 1 | 0 | 180 | -->Servo2 |
| 1 | 0 | 0 | 0 | 0 | 45 | -->Servo3 |
| 0 | 0 | 0 | 0 | 0 | 0 | -->Servo4 |
| 1 | 1 | 1 | 1 | 0 | 180 | -->Servo5 |
| 1 | 1 | 0 | 0 | 0 | 90 | -->Servo6 |
| 1 | 1 | 1 | 0 | 0 | 135 | -->Servo7 |
T(i) est un tableau de 5 octets (d'ailleurs 4 suffisent
!!!) qui est envoyé sur le portb où sont connectés les servos.
Pour modifier l'angle d'un servo, il faut balayer le tableau (de T(o) à T(3) ou
de t(3) à t(0)) et mettre à 1 ou 0 la ligne du servo correspondant. Il faut
naturellement utiliser un masque pour ne pas modifier les autres lignes !
exemple pour mettre à 45° le servo 2 :
Pour i=3 to 1
T(i) = T(i) AND 253 (masque : 253 =
11111101 en binaire) pour mise à 0
Fin pour
Pour mettre à 180° le servo 4 il faut faire :
pour i = 0 to 3
T(i) = T(i) OR 16
(16 = 00010000 ) pour mise à 1
Fin pour
On notera que pour augmenter la précision , il "suffit" d'augmenter le nombre de cases mémoire . Une précision de 1° nécessite donc 180 octets . Le temps de traitement augmente proportionnellement !
Note : le programme d'interruption durera globalement environ
4ms au maximum : en effet, on mesure la largeur de l'impulsion générée par le
récepteur HF (2ms max) au tout début de l'interruption et on stocke dans une
variable. Cette variable sera traitée dans le programme principal (on va la
comparer à diverses valeurs) pour connaître l'ordre envoyer par le PC .
Si on rajoute le traitement des obstacles, il en aura du boulot le petit 68HC11
!!!
Le matériel : Ordinateur PC sous Dos (programmation en Qbasic )
Emetteur HF : Télécommande modélisme (on en trouve facilement à la Réunion
pour environ 590 F avec 2 servos moteurs + récepteur)
Récepteur HF (bande 40Mhz ou 27 mhz) livré avec télécommande. Signal de
sortie : 2 voies - MLI .
68HC11 : controlboyf1 de chez Controlord.
Servo moteurs : couple 30Ncm (soit environ 3kg de charge admissible sur un
bras de 1cm)
Support robot : plaque de circuit imprimé
Pattes : équerres en acier de chez Mr. Bricolage...
Interface : à réaliser (avec un 4051 et quelques résistances) . le
tout connecté au port // du PC
Le principe est de remplacer le potentiomètre de la
télécommande par un réseau de 9 résistances identiques . La sortie du 4051
remplace la borne 2 du pota.
Le 4051 est un multiplexeur/démultiplexeur analogique . En fonction du code
appliqué sur ABC , l'un des interrupteurs internes va se fermer. On pourra donc
sélectionner une valeur parmi 8 et simuler 8 positions du pota et donc 8
largeurs d'impulsions distinctes.
Il suffit ensuite de mesurer la largeur d'impulsion au niveau du récepteur pour
exécuter l'ordre (Stop, avance, recule, droite, gauche ....) Il restera 3 codes
de libre .
Note: Avec la voie 2 , on peut faire de même , ce qui donnerait 8*8 = 64 codes
possibles ...
Vendredi 16 Novembre 2001
ROBOT AROBOT
Robot AROBOT : Il a été décidé de
remplacer le microcontroleur stamp par la carte 68HC11 E1(controlboy3) , qui
pose moins de problème de mise en oeuvre (le stamp IIec est récalcitrant
et ne répond pas, la cause est encore indéterminée , un problème de config ou
autre ...)
Le robot est monté au niveau mécanique, le 68HC11 a été monté, les premiers
programmes de tests de fonctionnement (avance / recule ) ont été réalisés. Les
élèves ont commencé à programmer l'interruption pour générer le signal de
commande du servo moteur de direction. Comme il n'y a qu'un seul servo, le
programme est très simple :
Programme interruption (interne, toutes les 16.4ms)
PORTA.4 =
1 ' mise à 1 de la sortie 4 du port a (reliée au
servo)
For t=0 to n
' n est valeur comprise généralement entre 100 et 200
next t
PORTA.4 = 0
Fin interruption
Pour n=100 on tombe pratiquement sur 1ms et pour n= 200 cela
correspond à 2ms , c'est pas cool çà ?
n est une valeur qu'on va modifier dans le programme principal pour faire varier
la largeur de l'impulsion et donc l'angle du servo.
Les élèves ont visualisé le signal MLI sur l'oscillo. Ils ont ensuite
commencé à monter un régulateur 7805 pour l'alim des servo, afin de ne
pas tirer trop de puissance sur le régulateur de la carte cboy.
ROBOT 68HC11 BUG
Génération des impulsions servo :
L'algorithme de commande des servo que nous avons développé a été
testé et les résultats sont concluants (avec le système de tableau,
voir plus haut, compte rendu du 31 octobre) . On a testé avec un servo réel
et visualisé les signaux sur oscillo. Il faudra simplement adapter les
angles (donc les largeurs d'impulsions) pour ne pas forcer les servos en buté
(consommation excessive et inutile) .
Commande à distance :
La synchronisation des interruptions sur un signal externe n'a pas été de tout
repos, la documentation sur le thème étant assez hermétique , faut
l'avouer. Finalement , en initialisant les bons registres au bon moment , on est
parvenu à obtenir notre synchro ... sur front descendant du signal externe (et
pas moyen de faire déclencher sur front montant alors qu'à priori c'est
possible d'après la doc controlord, arf ! ...) .
Je rappelle que notre idée de départ est de déclencher l'interruption sur le
front montant du signal MLI du récepteur de télécommande , de mesurer la
largeur de ce signal dans le programme d'interruption (qui gère aussi les
servos) .
Finalement, on a paramétré le timer du 68Hc11 pour qu'il se déclenche sur le
front montant du signal MLI, ce qui entraine automatiquement l'incrémentation
du registre PACTN , qu'il suffit alors de lire pour connaître la largeur de
l'impulsion
Si, pour une raison ou une autre, on avait pas pu utilisé le timer , la
solution aurait alors été d'inverser le signal R (MLI) en utilisant une porte
logique inverseuse ou un petit transistor.et 2 résistances. Mais bon, notre
solution actuelle marche très :<))
La technique du pota "numérique" en utilisant un 4051 fonctionne
très bien (on a mis un réseau de 7 résistances de 330 ohms bornées par deux
résistances de 1.2k , soit 9 résistances au total )
Un petit programme de test en Qbasic (sous PC) a été fait pour balayer les 8
codes possibles et au niveau du cboy f1 le décodage s'est fait sans problème
ni erreur de code (on affiche sur l'écran à cristaux liquide
"droite", "gauche" ... en fonction du code reçu). La
technique semble fiable et c'est de bonne augure pour la suite !
Mercredi 5 décembre 2001
Le 68HC11BUG
L'informatique avance plus vite que la mécanique
et .. arf .. il faut attendre que les mécanos terminent le câblage !!!
Vu que le 68HC11BUG est un prototype, les élèves ont dû plusieurs fois
monter/démonter les servos pour pouvoir réaliser de nouveaux perçages pour
faire passer fils, interrupteurs et attaches diverses. Montage d'un régulateur
5V (7805) , câblage des sorties du 68HC11 sur un bornier (pour connexion vers
servos) . Utilisation de deux batteries (pour isoler partie puissance et
commande ) ... etc ...
Positionnement du robot dans l'espace : Nous
réfléchissons actuellement sur la mise en oeuvre d'une technique pour
connaître la position (X,Y) du robot sur une zone délimitée (environ 6m*6m) .
Le principe que nous allons tenter de mettre en oeuvre est la
triangulation . L'idée de base est de connaître la distance du robot
par rapport à 3 balises (en pratique, on n'utilisera que 2 ..) et d'en déduire
la position du robot (X,Y), connaissant la distance entre deux balises.
La mesure va se faire par ultra son (émetteur 40khz sur
le robot ), avec un top synchro HF .
On espère pouvoir ainsi afficher en temps réel la position de notre robot sur
le PC qui va pouvoir calculer la trajectoire à suivre et commander à distance
notre 68HC11 bug !
Les premiers tests ont eu lieu pour la réalisation des émetteurs/récepteurs
et sont concluants (la pièce était même un peu étroite pour mesurer la
distance de réception max) . On émet des trains d'impulsions de 40khz (train
de largeur 2ms et espacés de 20ms) La démodulation du signal émis est bonne
et une petite porte logique trigger devrait nous fournir un beau signal
carré..
(1) d1^2 = x1^2 + y1^2
(2) d2^2 = (a-x1)^2 + y1^2 (car h = y1 )
On développe l'équation 2 :
(2) <=> d2^2 = a^2 + X1^2 - 2aX1 + Y1^2
dans l'équation (2) , on peut remplacer (X1^2 + Y1^2) par d1^2
d'où :
d2^2 = a^2 - 2aX1 + d1^2
D'où :
X1 = (d1^2 - d2^2 + a^2)/(2a)
Y1 = srq(abs(d1^2 - x1^2)) (sqr = racine carré et abs = valeur absolue)
Faudra vérifier si pour X1>a , cela marche . On considère dans tous les
cas, X>0 et Y>0
Ps : Sauf erreur de calcul, les équations sont à priori très simples.
Quand on fait des recherches sur internet sur la triangulation, on trouve
toujours des tonnes de cosinus et sinus , avec en plus 3 balises alors qu'à
priori on s'en sort avec 2 et des hypothèses simplificatrices (X>0 et
Y>0, balise 1 comme origine) . Si vous voyez une erreur , envoyez nous
rapidement un mail !!!
Sur le robot sera monté 4 transducteurs à ultra son dans
4 directions .Les distances d1 et d2 seront connues par la mesure du temps que
met le signal ultra son pour arriver jusqu'aux balises. Il est nécessaire de
connaître à quel moment le train d'impulsion est émis. La première
idée (plus compliquée) qui nous est venue est de placer sur le robot un
émetteur HF (aurel ou un émetteur radio commande 40mhz + 2 récepteurs , l'un
au niveau du PC et l'autre sur le robot lui-même qui vont donner les
synchros; mais cela alourdit le robot et prend de la place.
La deuxième idée (très simple !!) (de Fontaine C) est d'utiliser
l'émetteur HF au niveau du PC (qui envoie les ordres de fonctionnement au
robot) pour synchroniser l'émission des ultra-son du robot : Comme le
récepteur (au niveau robot) déclenche une interruption à chaque réception du
signal , il suffit tout simplement de commander le 555 à ce moment là (en
utilisant la patte 6 du port A, qui est libre). On utilisera un deuxième
récepteur HF, connecté au PC, pour avoir le top synchro.
Fontaine imagine même pouvoir faire une communication Robot ---> PC en
agissant sur la largeur d'impulsion émise... mais le problème n'est pas simple
car avec les tests actuels la largeur d'impulsion de réception varie en
fonction de la distance et de la qualité de la réception (position de
l'émetteur / récepteur) .
Dans tous les cas de figure, le seul mot d'ordre est : FAIRE LE PLUS SIMPLE POSSIBLE pour trouver la meilleure solution aux problèmes informatique et électronique...
La vitesse du son (donnée importante pour les calculs !!!)
La célérité " c " (ou
vitesse) du son est donné par :
c = 331 * racine [ (T+273) / 273 ]
Elle dépend de la température T de l’air :
Si il fait 0° C, cela fait une vitesse de 331 m/s
Si il fait 50°C, la vitesse est de 354 m/s
(info trouvée (et à vérifier) sur le site : http://perso.club-internet.fr/mafo/robots/telemetre.htm
)
Moralité : il faudra se munir d'un thermomètre pour ajuster les mesures .
AROBOT
Les premiers tests de déplacement avec commande
du servo moteur pour la direction ont eu lieu. Cela fonctionne mais comme pour
le 68hc11bug, il faut rajouter une batterie pour la partie puissance , afin de
garantir l'isolation électrique . Les parasites générés par les moteurs
perturbent le fonctionnement du 68HC11, même avec un découplage de
l'alimentation (+ conde au niveau du moteur)
Projet Ampli Audio
Le fonctionnement de la partie puissance est ok.
On a eu un problème au niveau du signal de puissance lorsqu'on connectait les
baffles : une sorte de retour de HF générée par les baffles entraînait un
grésillement affreux . On a bien tenté de placer un condo + résistance aux
bornes des baffles mais sans effet (on avait peut-être pas les bonnes
valeurs à moins que notre problème soit ailleurs. Si quelqu'un a déjà connu
ce type de problème, envoyez moi en email
. ) Bref, pour résoudre le problème , on a dû placer une self en série avec
la baffle et finalement cela marche plutôt bien.. Prochaine phase : le mixage.
Site internet et simulation sur workbench sont en cours (simuler le push pull
associé avec à l' AOP suiveur semble poser problème avec workbench qui
donne un signal erroné ... faudra essayer de déterminer le problème !)
Projet Afficheur 128 leds
La commande par PC est ok. Les lettres ont été
définies (matrice de 6*5 en général pour une lettre me semble t-il) .
Le site web est commencé . Un nouvel afficheur va être réalisé car les leds
du premier ne sont pas suffisamment lumineuses ( pour une même commande,
on gagnera beaucoup en luminosité) .
19 Décembre 2001
La mécanique du 68HC11BUG a eu juste le temps d'être terminée et a nécessité une modification au niveau des pattes centrales (qui soulèvent le robot) . Elles ont été raccourcies pour augmenter le couple , sinon le petit servo était incapable de soulever le véhicule. On s'y attendait un peu. Mais bon, le robot sait marcher plus ou moins droit, tourner à gauche et à droite , en fonction des ordres envoyés par le PC. La démarche est encore mal assurée (il a tendance à dévier) et des solutions logicielles et mécaniques sont encore à apportées. On verra cela à la rentrée de février.
!!!! VACANCES D'ETE A LA REUNION !!!!
05 Février 2002
Projet 68HC11 bug :
Réalisation du circuit imprimé du système de détection à
ultra-son pour la triangulation (balises)
Les tests sur platine d'essai (lab) on été menés avant les vacances : on a
placé une balise émettrice (5 émetteurs à ultra son piloté par un 555 +
buffers inverseurs pour doubler la tension) sur une chaise mobile (pour
simuler la voiture ...) et monté notre récepteur . Pour le récepteur, le
montage qui avait été réalisé dans le cadre du robot
RLP2000 (en 2000) a été repris, boosté en rajoutant un deuxième étage
amplificateur suivit d'un étage pour la mise en forme du signal afin qu'il
génère un (beau) signal carré .
Le problème principal était de trouver un bon compromis "stabilité/
sensibilité " . On a pas mal bricolé, et fait plusieurs mesures en
essayant d'éliminer le maximum d'angles morts. La vitesse du son a été
mesurée sur l'oscillo (les décalages temporels sont facilement mesurables car
de l'ordre de la milliseconde ). Tout n'est pas rose , car les mesures sont
entachées d'erreurs induites entre autre par le récepteur : lorsqu'on
est proche ou éloigné , la réception n'a pas la même amplitude ce qui
entraine un léger décalage temporel du détecteur (la pompe à diode met plus
de temps pour se charger)... comme on a plus la linéarité, la relation d
= V*T devra être corrigée par programme pour retomber sur des valeurs
correctes de la distance mesurée effective . On espère toute fois avoir
une précision d'environ 5cm. (sur une distance de 3m)
Le typon est terminé. Reste percer et à monter les composants.
Les schémas seront donnés ci-dessous dès que possible (pour l'instant, tout
est sur papier) .
Les deux AOP LF351 sont montés en ampli inverseur et polarisés
à Vcc/2 .La "pompe à diodes" sert à redresser et filtrer le signal
40khz pour ne récupérer que l'enveloppe positive (modulation BF) . Le signal
est ensuite mis en forme par 2 nands trigger . Un monostable 4528 (monté en non
redéclanchable ) génère une impulsion de largeur constante qui est
envoyé vers le PC.
On a essayé d'avoir un signal le plus propre et le plus stable possible afin de
ne pas donner trop de fils à retordre au programme de traitement ...
Pour l'émetteur à ultra son, on placera 5 à 6 transducteurs .
Le 4069 est un buffer inverseur . Le montage permet de doubler la tension
d'attaque des transducteurs qui voient à leurs bornes tantôt +Vcc -0V
tantôt 0V - +Vcc (et donc amplitude crête à crête = 2*Vcc)
L'entrée Reset (inversée) sera pilotée par une sortie du 68HC11 via un
transistor qui permet d'adapter la tension (5V -> 12V)
Le signal 20ms généré par le 68HC11 est en synchro avec l'émetteur HF (coté
PC) . On peut ainsi connaître à quel moment est envoyé le train d'onde 40khz
.
Notre système fonctionnera dans une zone d'environ 6m * 6m max (largement
suffisant pour nos essais). En effet, 20ms * 320 m/s = 6.4 m . Le récepteur
(voir plus haut) va recevoir un signal décalé dans le temps . Le décalage
temporel maximum autorisé dépend de la période de l'émission (qui est
de 20ms). Le décalage temporel qui est utilisé pour mesurer la distance entre
l'émetteur et le récepteur (connaissant la vitesse du son dans l'air , voir
plus haut)
Le source du programme en basic11 du 68HC11 pour gérer le robot. (fonctionnel mais à améliorer )
AROBOT :
Câblage des antennes sur les entrées du cboy3 . En cas de contact, l'entrée correspondante passe à zéro. Mise en place des procédures "avance , recule, tourner gauche ..." et réalisation du premier programme de prise en compte des obstacles. Après quelques réglages , le robot est maintenant capable de détecter obstacle antenne gauche ou droite et agit en conséquence (recul , tourne en sens opposé ...) . Le résultat est sympathique ! Les élèves réfléchissent aux améliorations à apporter (détecteur arrière, suiveur de ligne infra rouge ....)
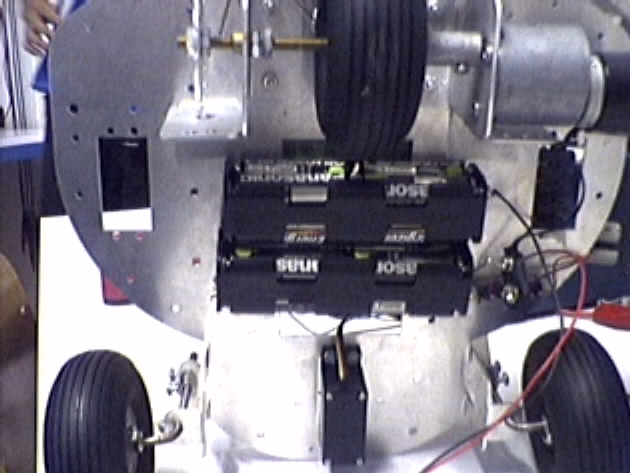
Photo du robot . vue
de dessus (arrière)
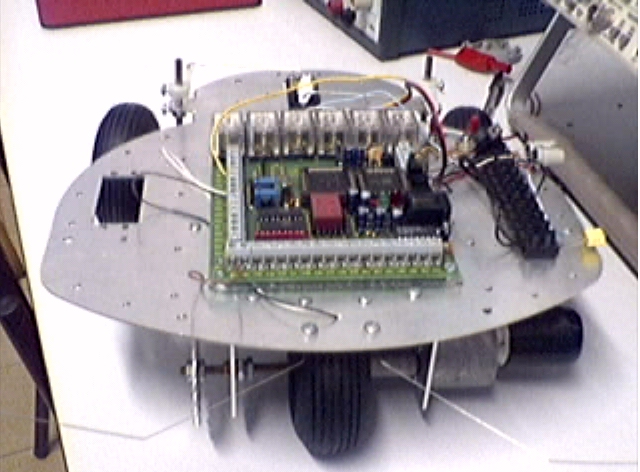
Photo vue de dessous
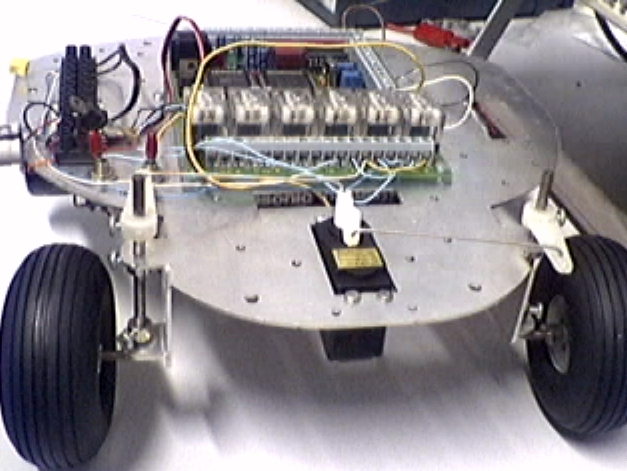
Photo vue de dessus
(avant)
Autres photos
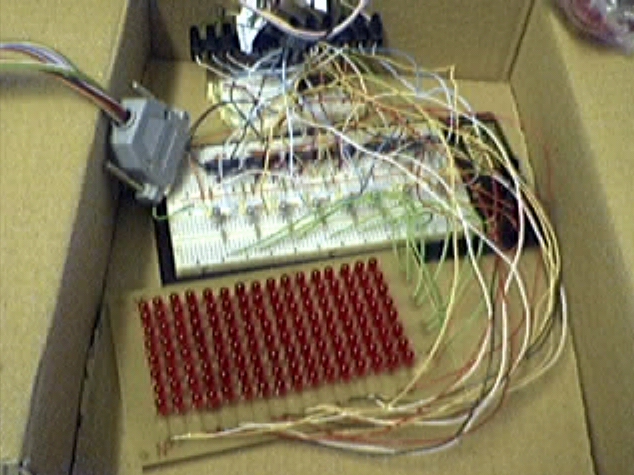
Projet Afficheur 128 leds
Réalisation d'un programme pour faire défiler une lettre puis
pour afficher un mot de 3 lettres . Il faudra ensuite réfléchir à
l'algorithme pour faire défiler les mots puis réaliser un typon pour ne plus
avoir de labs et fils volants ... :
Photo du montage afficheur
Photo en gros plan du câblage
19 Février 2002
Pas cours la semaine dernière
(stage solidworks prof) . Les projets n'ont guère avancer. (et avec les futurs
mardi qui vont sauter, on risque d'être très limite au niveau timing. Bref, il
faut essayer d'être le plus efficace possible pour gagner du temps ...).
Pour la voiture arobot , on va monter une caméra + un capteur à ultra
son sur une tourelle piloté par servo moteur. Il faut aussi rajouter la
commande radio. On avait réfléchi à un système de guidage au sol par bande
réfléchissante (+ diodes infra rouge) mais dans le cadre de l'exposcience , il
est fort peu probable qu'on ait une surface suffisante au niveau du stand pour
faire circuler le véhicule (en tout cas, pour l'expo 2000, on voulait 30m2 et
on en a eu 4 ...). Il faut donc utiliser les couloirs (aussi utilisé par le
public) et les bandes sur le sol risquent de ne pas faire long feu (s'abîment,
se salissent rendant le guidage aléatoire).
Le choix du système caméra + ultra son sur tourelle est de plus assez fun et
devrait etre assez aisément réalisable, car on a déjà étudié le système
E/R ultra son. Il faut donc réaliser les circuits imprimés (commencé ce jour
) et prévoir les emplacements sur le véhicule
Pour le 68HC11Bug, les fixations des pattes sur le servo ont été
renforcées (deux vis au lieu d'une) et la vis centrale doit être remplacée à
terme par une vis plus longue (l'un des servo semblait se désaxer , nous
donnant quelques sueurs froides ...un problème mécanique de ce type nous
obligerait à revoir toute la structure et à trouver des servos plus costauds,
retardant d'autant les développements )
Le poids de la voiture va encore augmenter avec les émetteurs Ultra-Son +
circuits imprimés + emetteurs aurel HF + boussole... faudra faire très
petit et espérer ne pas atteindre la masse critique ... lol. A propos de
boussole, on l'a reçue depuis 15 jours, mais pas encore eu le temps de tester
(faut calibrer le nord / sud /est /ouest)
Le principe qu'on a retenu (mais à tester !) est de la brancher directement sur
l'émetteur aurel . Le PC va recevoir le signal MLI . En mesurant la largeur
d'impulsion , on va connaître la direction du véhicule.
13 Mars 2002
Afficheur 128 leds : Tirage de la nouvelle plaquette de leds ok. reste à percer / souder. Réalisation de l'algorithme pour faire défiler les lettres. Le prof expose le principe général et les élèves réalisent le codage proprement dit. Dans un premier temps, on a fait déplacer lettre par lettre , dans un deuxième temps (prochaine séance) on fera un décalage colonne par colonne.
Ampli audio : Après avoir cramé 2 transistors de puissance (probablement un cc avec du Vcc sur base), les élèves ont rajouté un micro. Montage simplifié pour gagner du temps en injectant le signal juste après le condo d'entrée de la source audio. La baffle est terminé (a été dessiné sous solidworks) .
Arobot et 68HC11bug : Les typons des circuits ont été réalisés et tirés . Les perçages et soudages des composants sont en cours . Il y a 3 émetteurs ultra-on , 2 récepteurs à 1 AOP et 2 récepteurs pour triangulation. Il faudra racheter les quelques résistances et condos qui manquent.
15 jours de vacances (jusqu'au 2 avril :<)
12 AVRIL 2002
On ne chôme pas depuis 10 jours,
les maquettes électroniques sont en cours de finition ainsi que les
câblages, les tests vont bientôt pouvoir (re) commencer, avec surtout la partie
programmation. On a finalement décidé de placer le système de repérage
spacial (emetteur pour la triangulation) sur l'arobot, qui est plus apte à
supporter la charge. La mini-caméra sera montée sur tourelle (servo moteur)
... on est pressé de voir le résultat ! L'exposcience est prévu du 3
au 7 juillet, cela paraît loin mais avec les vacances en mai et le bac en
juin, il reste grosso modo 1 mois 1/2 de travail pour boucler les projets (soit
7 à 8 séances max), en espérant qu'on ait pas de problème majeur ...
Le câblage du véhicule rlp2002 est ok au niveau des relais mais a
nécessité 2 vérifications du prof . En effet, la moindre erreur peut
entraîner un court-circuit et endommager la carte cboy3. Il faudra ensuite
tester le hacheur pour la régulation de vitesse (devrait mieux fonctionner par
rapport à la version 2000)
19 AVRIL 2002
Premier gros pépin : on ne peut pas utiliser
les autres émetteur HF 41 Mhz avec l'interface PC . Après test, le premier a
fonctionné 10mn puis est décédé ... on ne tentera pas le diable avec le
deuxième. La raison reste à déterminer : tout semblait pourtant ok (même
valeur de pota, mêmes niveaux de tension ...) . Peut-être qu'il n'a pas
résisté au fait qu'on veuille envoyer une impulsion plus large que celle
d'origine ?
Conséquence : on modifie les projets comme suit : L'arobot sera piloté par
module aurel HF . Le 68HC11Bug (insecte) par la télécommande 27Mhz reliée au
PC (qui fonctionne toujours bien) et le RLP2002 sera commandé
"manuellement" à partir du deuxième émetteur 41Mhz (rescapé)
.
Le module Aurel a été testé (vitesse grand V !) et donne à priori
satisfaction (fonctionne dans tout le labo en tout cas). On simulera le meme
signal servo que la télécommande . Le top synchro HF pour la triangulation est
directement fourni par le PC, plus besoin de deuxième récepteur. En cas de
problème sérieux, on a deux autres modules aurel (dont celui du rlp2000) ce
qui nous permet de voir venir.
AROBOT :
Le montage/câblage de la tourelle caméra + emetteur VHF est terminé, ainsi
que l'émetteur à ultra-son et l'antenne US. (+ le régulateur 9V caméra -
le7809-)
Il reste : Réaliser le typon pour les modules Aurel et les monter ... puis
faire les tests et programmes .
RLP2002 :
Le montage des divers éléments a demandé de la réflexion, il n'était pas
évident de trouver des points de fixation .
Les capteurs à ultra son à l'avant ont été fixé sur un support plexiglasse
avec 2 équerres qui maintiennent le tout sur le chassis avant (c'est bien mieux
qu'il y a 2 ans !). Les cartes électroniques sont toutes vissées avec un point
d'attache (largement suffisant pour l'instant ...)
68HC11F1 :
Il reste à placer le capteur US (+ cartes E/R us) . Le programme de
commande est à améliorer (et il faut intégrer la gestion du capteur US)
AFFICHEUR 128 LEDS :
L'afficheur a été refait avec des leds qui éclairent mieux . 256
perçages et points de soudure, les élèves ont apprécié !
Il restera à réaliser le programme de décalage colonne par colonne et
éventuellement faire le typon de la carte électronnique complète (si ya le
temps)
AMPLI AUDIO :
Le projet est pratiquement bouclé , l'animation solidworks de la baffle est
faite (je crois) , il reste à fignoler le site internet et à faire le
typon de l'ampli si ya le temps.
L'arobot 68HC11

La partie électronique est ENFIN bouclée (22 avril) . Il faut s'attaquer maintenant sérieusement au logiciel. (ce serait bien de boucler avant les vacances de mai (le 7) ... Amenez des matelas au labo ...
30 Avril 2002
RLP2002 : La programmation est ok : la gestion du protocole de communication (basé sur la mesure des largeurs d'impulsion de la télécommande) est ok et fonctionne bien :<) . Il reste à traiter les infos capteurs (ultra son) et à activer le hacheur (pour la régulation de vitesse).
AROBOT 68HC11 (photo ci-dessus) : Big problème avec nos
modules aurel : Pourtant, on pensait avoir trouvé la parade aux
problèmes connus jadis (en 2000) , en balançant un signal type servo (mli) :
les tests préliminaires étaient ok (sans la carte 68HC11) , la réception du
signal se faisant sans problème dans tout le labo. Dès qu'on connecte la carte
mère, rien ne va plus. On pense alors trouver la nature du problème : la
tension d'alimentation insuffisante mais Murphy étant dans le coin, on peut
vérifier l'une de ses loi : le montage fonctionne uniquement avec
l'oscilloscope branché ... (!!!) Dès qu'on déconnecte l'appareil de mesure,
la voiture répond erratiquement aux commandes du PC distant. On reconnecte et
ça marche (...). On vérifie toutes les masses mais rien n'y fait, la
communication HF n'est pas satisfaisante. Tenter de résoudre un problème qui
disparaît dès qu'on tente de faire une mesure, c'est quand même pas rien et
cela mérite le détour...
Ce qu'on va faire : tester un autre émetteur 433Mhz, fiabiliser le protocole.
Au pis, on utilisera l'émetteur 27Mhz, mais j'espère ne pas en arriver là.
Sinon, le programme est ok et on peut piloter sans problème les deux servo (
tourelle + direction) et le moteur de propulsion
3 Mai 2002
AROBOT 68HC11 :Le changement d'émetteur n'a rien donner
de probant et on est donc revenu au montage initial pour tenter de résoudre le
problème . On pense y être parvenu (la prudence est de mise), mais voilà ce
qu'il a fallu faire :
Analyse du problème : le signal carré (2ms espacé de 20ms) avait tendance à
être parasité pour une raison inconnue (parasite de fréquence 1kz
environ)
Ce qu'on a fait : augmentation de la tension d'alimentation du récepteur (15,5V
au lieu de 12V) et de l'émetteur (9V) au lieu de 5V.
Batterie séparée (2 piles de 9V, dont l'une un peu usée pour avoir du 15,5V).
Raccourcissement de l'antenne (!) 3cm (+ 2cm de piste) . En théorie, l'antenne
devait faire 1/4 de longueur d'onde, soit 16cm.
Augmentation drastique du temps haut (20 ms ) et du temps bas (55ms ) + rajout
d'un condo de 680nF entre la sortie du récepteur et la masse, afin d'éliminer
tout parasite à 1kz.
Le résultat : les tests sont probants, il suffira de
rajouter un petit filtrage logiciel pour parfaire la commande.
Pour en revenir à Murphy , en déconnectant la fiche RCA de l'oscillo, avec
les câbles toujours reliés au récepteur aurel au niveau de la sortie , tout
marchait bien ... en enlevant le connecteur RCA, plus rien ne fonctionnait.
De toute évidence, les fils supplémentaires avaient un effet, apparemment
atténuateur (?), sur la réception HF car en diminuant la taille de l'antenne
on obtient le même (bon) résultat Il faudra tester avec des antennes
spéciales 433mhz, mais faut commander (bref, faut attendre 1 mois minimum, la
métropole c'est pas la porte à côté !)
AFFICHEUR 128 LEDS : La programmation du scrolling colonne par colonne est terminée et fonctionne bien. Il n'y a pas eu de problème électronique particulier, ce qui a permis de passer tout le temps (2h30) sur la recherche de l'algorithme et la mise au point - c'est plus reposant que de se taper du murphy- . Le résultat final est assez sympa (on entre une phrase au clavier, et elle défile sur la matrice de leds)
68HC11bug : L'animation du sous solidworks (sortie format avi) est ok Il faut finaliser le site web.
VACANCES (15 jours) en Mai
01-Juin-2002
Les projets ont été présenté à l'oral des TPE. Bonne prestation
globale des élèves.
Voir les sites webs : http://louispayen.apinc.org/
Pour le rlp2002 (voir photo ici) , il reste les ultra-son à prendre en compte, rajouter un petit buzzer. Idem pour l'arobot .
06 juin 2002
Tests de fiabilité
Un montage qui marche un jour et qui déconne le lendemain n'est évidemment pas acceptable . Il faut donc faire fonctionner les projets suffisamment longtemps pour tester leur fiabilité dans le temps ... et évidemment il y a eu des problèmes à résoudre:
Le 68HC11BUG (robot sur patte) : il est impératif de filtrer l'alimentation externe (12V et 5V) en réalisant deux gros filtres passe bas (avec big self + big condo de 2200uF) . En effet, l'alimentation a tendance à être perturbée par la puissance de l'émetteur HF : les symptomes : en sortie de l'alim, vous avez du 5V, en fin de ligne (au niveau maquette) du 4,4V ou encore une alim qui s'affole (peine à stabiliser ) ... Précisons qu'avant de découpler, on a tout vérifier (masse, câble ... etc ) . De plus il faut baisser l'antenne pour limiter la HF , la portée reste largement suffisante (tout le labo) pour les tests.
Le RLP2002 : les moteurs absorbent bcp de puissance (et émettent des
parasites) et un gros condo de filtrage au niveau des batteries a été
nécessaire. De plus , on a alimenté les relais de la carte mère du controlboy
avec une alim séparée (faut enlever le connecteur J2) . Ne pas oublier de
mettre un condo de découplage en sortie du 7805 (ou 7806) car il oscille horriblement avec la charge inductive des relais (cela semble couillon
mais on a perdu 1h à comprendre le problème , car avec tous les fils dans tous
les sens, on fini par se demander s'il n'y a pas un court circuit quelque part qui
fait que notre régulateur ne régule plus ...)
La chute de tension au niveau du 68HC11 est un facteur important de plantage et
chaque fois que deux relais sont commutés, on pouvait voir une chute de 0,2 à
0,3V (4,7V au lieu de 4,9V ou 5V) . Jusqu'à présent, on avait jamais touché
à l'alim des relais, on faisait confiance au contructeur de la carte controlboy
(controlord) ... qui avait prévu , à sa décharge, un cavalier J2 pour ce type
de problème !
Le hacheur (régulateur de vitesse): les transistors ont été monté à
l'envers par un élève . Après dessoudage et ressoudage, il marche
finalement pas mal .
Test de l'émetteur / récepteur ultra-son : il faut rajouter une résistance de
33k aux bornes du transducteur récepteur.
Rajout d'un buzzer , fonctionnement ok. (lorsqu'on active télécommande ou en
cas d'obstacle)
Rajout d'un radiateur sur le régulateur 7805 (alim des relais) car tendance à
chauffer.
Une erreur de câblage a entraîné la destruction de la sortie A6 du
68HC11. C'est la première erreur fatale en 3 ans d'utilisation du 68HC11 par
les élèves, fallait bien que cela arrive un jour ...
Il faut boucler les tests avant le 12 juin (en particulier programmer le mode
autonome).
 |
Le "robot" RLP 2002 . Muni de capteurs à ultra son, d'un buzzer , il est radiocommandé. |
BAC du 13 juin au 1er juillet
INFO EXPOSCIENCES (4 - 7 juillet 2002)
Les projets ont eu un franc succès au près du public. Les 3
robots présentés (RLP2002 , AROBOT et 68HC11BUG) ont bien fonctionné, même
si l'arobot nous a donné du fil à retordre les deux premiers jours ! .
Dès que possible, on :mettra ici les photos et commentaires
Cliquez ici pour voir les photos de l'exposciences 2002
CONCLUSION POUR LES PROJETS 2001-2002
| AFFICHEUR multiplexé 128 LEDS | - Projet mené à bien (affichage de textes + défilement du message ) | Améliorations possibles : - gagner en puissance d'éclairage - Passer à un affichage 256 leds - Finition (typon, logiciel, dossier technique) |
| Robot RLP¨2002 (véhicule dont la partie commande a été entièrement refaite) |
- Projet mené à bien , mais test capteur ultra-son pas terminé. Bon travail général de l'équipe. | Améliorations possibles : - commande pont en H à transistors au lieu de relais (ou utilisation de relais plus puissants) - dossier technique à enrichir avec plus d'explications. |
| Arobot (véhicule piloté par Pc avec caméra monté sur tourelle) | - Projet (ambitieux) pas complètement terminé à cause de
divers problèmes techniques qui ont retardé l'avancement du travail. Cependant l'objectif principal a été atteint , à savoir la commande à distance du véhicule et de la tourelle caméra par le PC. |
Améliorations possibles : - Améliorer la fiabilité générale (en particulier la réception HF ...) - Capteur antenne (TOR) à prendre en compte. - repérage spatial par triangulation à terminer |
| 68HC11BUG (Robot 6 pattes à servo moteurs) | Projet mené à bien. La partie mécanique n'est pas très au point car le robot avance en crabe mais l'algorithme de séquencement des pattes est ok. | Améliorations possibles : - Revoir toute la partie mécanique ... - rajouter des capteurs |
| Ampli audio LE SITE WEB (version 1) Le site web (Version 2 complet) |
Projet mené à bien | Améliorations possibles: NEANT . Il n'y aura plus de projets analogique de ce type. |
Cliquez ici pour sommaire Labo SI LLP : http://louispayen.apinc.org/
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}