|
 |
68 HC 11 BUG
|
|
Modifications effectuťs par l'ťquipe technique :
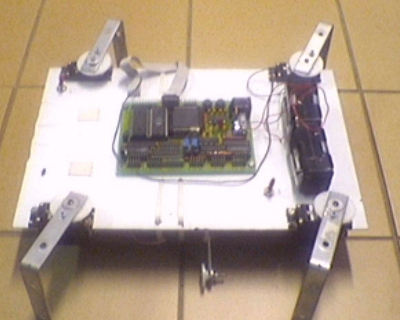
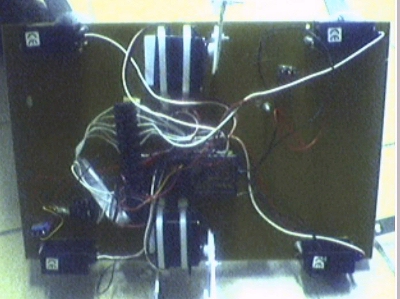
Nous avons conÁu et rťalisť entiŤrement notre systŤme automatisť. Plusieurs modifications ont ťtťs apportťes
* La taille de la plaque de support a ťtť triplťe.
* Au lieu des 3 servos-moteurs originaux, nous avons installť 6 servos. Normalement, il y a un servo pour soulever l'araignťe, et 2 pour soulever les pattes latťrales. Les pattes avant ťtťs reliťes aux pattes arriŤres ŗ l'aide de fils de laiton, assurant ainsi une coordonnance entre les pattes avant et arriŤres irrťprochable. Les 6 servo-moteurs sont totalement autonomes et font l'objet de programmation pour chacun d'entre eux. Afin de faciliter notre tache dans la concordance entre les pattes avant et arriŤres et afin de maintenir les pattes latťrales parallŤles, nous avons dťcidť de n'envoyer qu'un seul signal pour les deux pattes du mÍme cŰtť. Cela a ťtť rendu possible en installant les pattes dans le mÍme sens.
* Une tťlťcommande permettant le contrŰle de la machine par un ordinateur a ťtť rťalisťe.
* Le programme de contrŰle n'est plus Basic Stamp 1, mais Control Boy.
| Dťtail des pieces | |
| Modťlisation et animation avec SolidWorks | |
| Programmes dťtaillťs | |
| Notice de montage |