 |
|
    
|
Introduction au sujet : Pour commencer, nous avons fait des recherches sur le casque avant d'avoir celui ci entre les mains.
Cette étape qui a précédé la mise en pratique nous a permi de comprendre le système et de le prendre en main plus rapidement.
Une fois le casque en main, nous avons commencé différents tests avec le programme, nous avons émis des hypothèses quant à l'activité du cerveau modélisée sur les graphiques . La création de la coque a commencé en même temps que la réalisation du programme et du site. Elle a donné beaucoup de mal à Guillaume et Sahedeva qui ont travaillé dessus pendant l'intégralité du projet. Nous nous sommes légerement inspirés sur un prototype d'Audi mais à cause de la contrainte du temps nous n'avons pas pu faire quelque chose de plus beau. 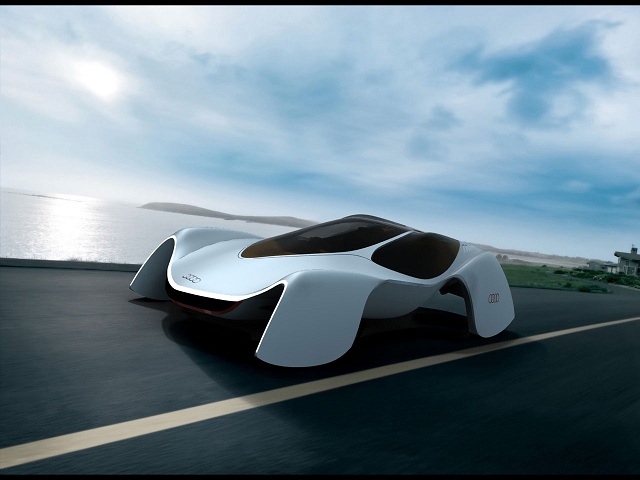 Les contraintes posées étaient de faire une coque de la bonne taille qui soit plus élégante possible afin de renforcer la fonction d'estime et de garder la fonction technique (fixation sur la carte mére). La coque devait aussi être résistante ce qui n'est pas le cas à cause du matériau plastique d'origine assez mou. Ainsi il a fallu faire des ajouts de matières aux endroits stratégiques pour garder un maximum d'esthétique tout en faisant de notre coque une coque viable. 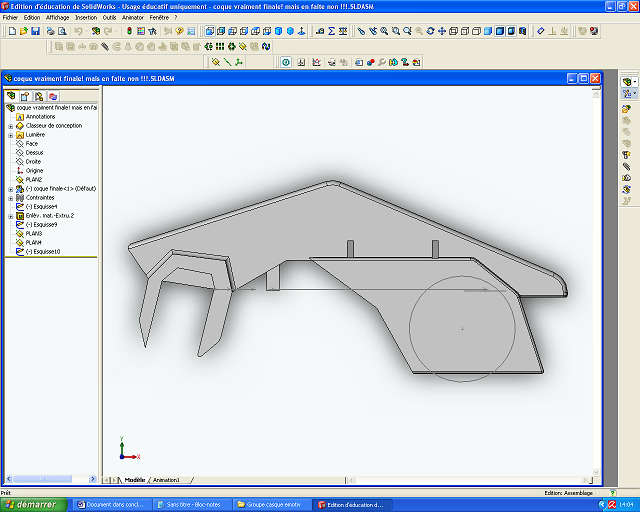 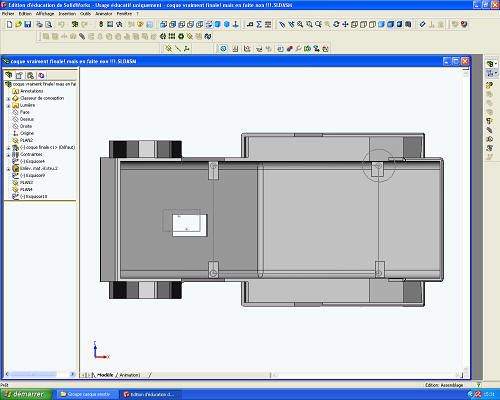 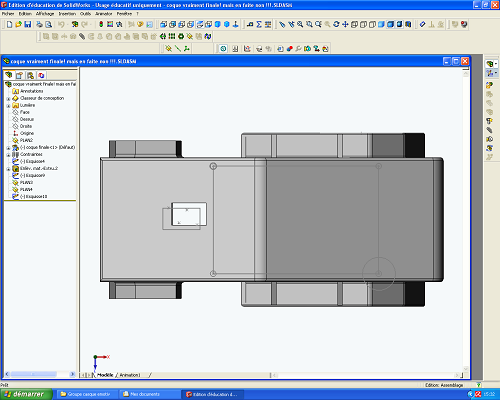 La réalisation du programme a également été assez complexe : l'objectif était de recueillir les informations émises par le casque pour faire se déplacer le robot Finch. C'est Charles qui s'y est collé. Le programme fonctionne de cette façon : il récupère les informations émise par le casque qui sont insérées dans une TextBox. Une fois les informations dans la TextBox, le programme les analyse et associe à chacune des informations à un ordre en langage Visual Basic que le robot comprend. Voici à quoi cela ressemble : ici chaque paragraphe correspond à un mouvement associé à une information. 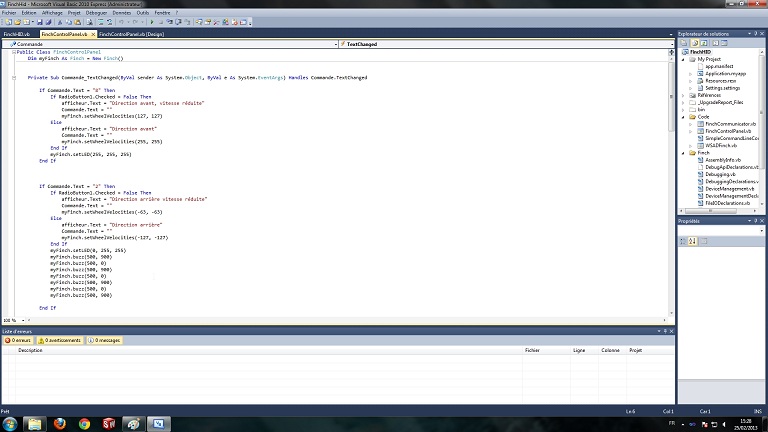 Voila une photo du premier programme qui nous permet de lier le casque à l'ordinateur : 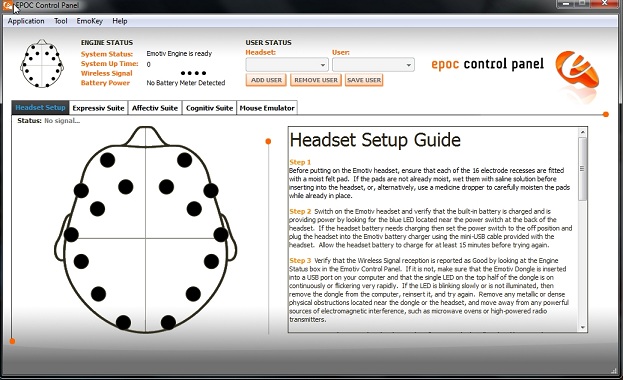  Il faut y préciser la commande qui permet au robot Finch de "comprendre" qu'il faut se déplacer. Il faut aussi insérer les vitesses (de chacun des roues) les autres commandes (ex les commandes du buzzer et de la LED) et des délais s'il y en a. Enfin Charles a créé l'interface graphique en utilisant une image qu'il a retouché et en y insérant des TextBox et les Labels qui vont permettre l'utilisation de ce programme par un utilisateur. C'est ainsi que le programme a été développé. Voilà à quoi ressemble l'interface graphique :  Et voici quelques lignes du code : 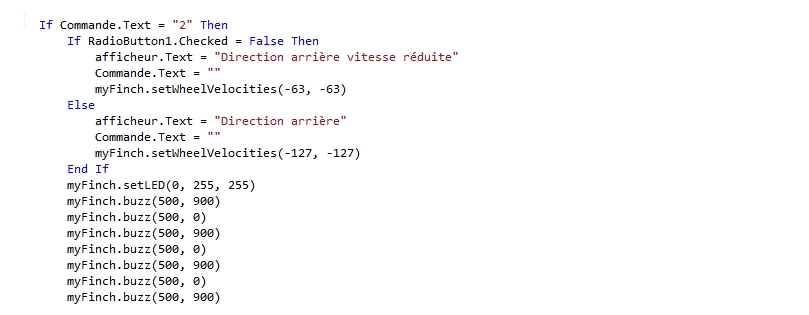
Pour afficher les codes sources principaux du programme que nous avons développé, cliquez ici : Pour finir, nous allons aborder la réalisation du site : c'est Kevin qui a accompli cette tâche. Le site est composé de 5 onglets et vous permettent d'accéder aux informations liées à notre projet. Pour développer le site, Kevin a utilisé NotePad++ qui lui a compliqué la tâche (comparé au simple bloc note) en lui offrant une interface ergonomique. Le langage qui lui a permis de développer le site est le HTML. Maîtrisant ce dernier, Kevin a pu nous développer un site avec une bonne esthétique (n'oublions pas que ce jugement est subjectif) ayant également pour fonction de laisser une trace écrite organisée de notre travail. Les 5 onglets sont respectivement : -Accueil (contenant une présentation de notre projet), -Réalisations personnelles (si vous lisez ceci c'est que vous êtes dedans), -Recherches (qui contient les recherches liées au casque et au robot Finch), -Carnet de Bord (qui résume chacune de nos séances) - Conclusion (qui contient une conclusion de notre travail répondant à la problématique). 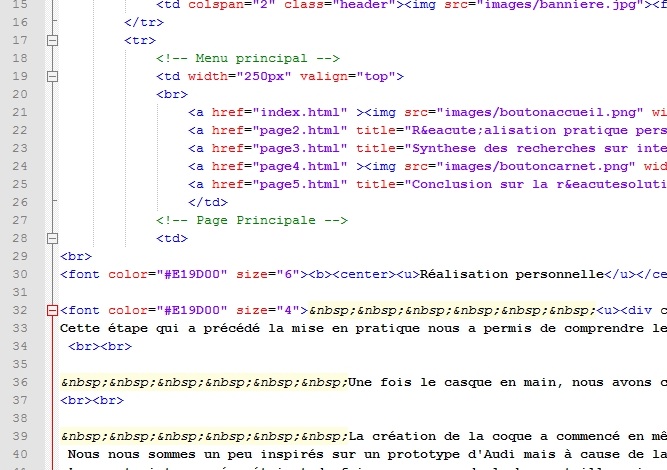 |
| © copyright 2013 - Kevin Lepinay | |