Présentation, Explications, Construction, Cablage, Photos, Réalisation SolidWorks
Présentation
Notre TPE consiste à construire et programmer un robot télécommandé. Pour cela nous disposons d'une base quadrimoteur à chenille, d'un récepteur 2 voix (41.100 Mhz), d'une carte de puissance et d'une carte mère ainsi que de toute sorte de vis, écrous, boulons, plaques de pvc etc.
Explication du système
Voir les composants principaux du circuit électrique du robot
Le pilote (la télécommande) envoie un signal radio que l'antenne de la carte réceptrice capte, puis décode le signal. Etant directement reliée par cable à la carte mère,
la carte réceptrice lui envoie l'information récemment captée et décodée que le microcontroleur va traiter. Le signal est alors redirigé vers la carte relais (l'interface de puissance),
qui va transmettre la puissance aux moteurs qui vont donc transformer l'énergie électrique en énergie mécanique permettant au robot de se déplacer.
La Radiocommande

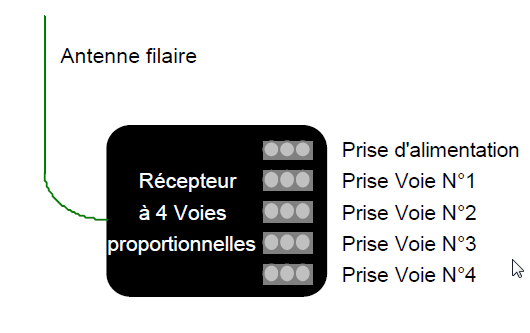
Le récepteur (à installer évidemment dans le modèle !)
Le récepteur se présente sous la forme d’un petit boîtier de la taille d’une boîte d’allumettes. Il y sort une antenne filaire.
Un petit groupe de connecteurs permet d’y raccorder le pack d’accus (ou les piles) de réception, les servos, variateurs.
L’aspect radio de l’émetteur
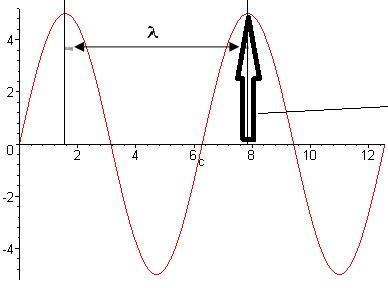
Pour envoyer ses ordres, l’émetteur modifie une « porteuse ». Cette porteuse est une onde radio à haute fréquence (d’où l’utilisation du récepteur HF ): généralement 41 MégaHertz (41 MHz) ou
72 Méga Hertz (72 MHz). Pour transmettre l’information (la position des manches de l’émetteur), cette porteuse est « modulée » (c’est-à-dire «déformée de manière contrôlée») soit en amplitude
(AM), soit en fréquence (FM). Il est préférable d’investir dans une radio-commande FM, car la réception est moins sensible aux divers parasites (perturbations radio-électriques).
Définition du trim
Le trim est un système incorporé a la télécommande de tel
façon a pourvoir agir sur le potentiometre et jouer sur le signal envoyé. Et
ainsi de compenser les défauts de construction ou a une contrainte environnementale,
grâce à système l'utilisateur nan plus besoin de réguler manuellement ces problèmes.
En application les trims sont utilisés sur les modèle réduit radio commandé
pour pouvoir réduire un défaut qui les empêche d'avoir un trajectoire droite,
ou pour les faire avancer sans même pousser les manettes des gaz, mais on
retrouve les trims dans l'aviation aussi au niveau des volet afin de maintenir
l'appareil dans une position stable.
La carte réceptrice
Variation de la fréquence sur notre robot radio télécommandé
Tout d’abord il faut savoir que notre « télécommande »est composée de 2 joysticks que le génie électrique associe à des potentiomètres. Le potentiomètre a pour fonction de faire varier la valeur de résistances dans le circuit afin d’obtenir une variation du signal au niveau de l’antenne de a télécommande. Chaque potentiomètre créée son propre signal. L’oscilloscope a donc détecté 2 signaux distincts qui vont donc être modulés. Ces sont des signaux périodiques (qui se répètent dans le temps) afin d’être adapter au récepteur HF (il recevra 41MHz de la télécommande), ils seront modulés par les potentiomètre. On observera alors une réelle variation du temps haut (ou Th) lors des déplacements des joysticks. Le signal « post-modulation »est appelé la « porteuse » et sa fréquence vaut approximativement 41MHz. Le récepteur HF va donc démoduler le signal pour l’adapter au robot.
Construction
Nous avons décidé de fixer une plaque de pvc sur la base pour avoir une plateforme de fixation et d'installer un étage pour placer nos cartes et récepteurs.
- En premier lieu nous avons fixé la première plaque(17/10) sur la base a l'aide de 4 vis(tout en laissant passer 2 trous pour les fil).
- Puis nous avons installé l'étage, une plaque de pvc moins grande que la première(10/10), a l'aide de 4 tiges filetées et de 16 écrous.
- Ensuite nous avons placé le récepteur sur l'étage en le surélèvent a l'aide d'entretoise pour ne pas être gêné par les tiges filetés.
- Après, l'étage étant au dessus de la moitié arrière de la base, nous avons donc fixé la carte de puissance sur la moitié avant .
- Et puis a l'aide d'une charnière nous avons attaché, a l'étage, un dernière plaque(11/10) pour pouvoir fixer la carte mère.
- Nous avons mit l'interrupteur a l'arrière de la grande carte et la masse a l'arrière de l'étage.
- Pour finir nous avons installé un support de chaque coté pour placé les blocs batteries.
Cablage

Photos


Sur ces deux premières photos, nous pouvons observer la partie avant du robot. Sur la photo 1 (à gauche), tout l'ensemble du robot est visible avec les roues et chenilles sur les côtés droites et gauches, la carte mère et le microcontroleur sur le devant attachés par une charnière à l'étage soutenant la carte réceptrice. Sur la seconde photo (à droite), un zoom est effectué sur la carte mère, qui comporte un écran relié au microcontroleur qui se trouve en dessous (donc non visible sur cette photo), des borniers permettant de la relier aux systèmes et des fils (de nombreuses couleurs) qui permettent de définir les sorties des informations envoyés par le microcontroleur.


Sur ces photos, nous avons la carte réceptrice (à gauche) supportée par l'étage et la carte relais (à droite) située sur la base, sous l'étage. Sur la première photo (à gauche), nous pouvons observer la carte relais qui permet de capter l'information envoyé par la radiocommande et de l'envoyer à la carte mère (donc au microprocesseur). La grande tige sur la carte supporte l'antenne de réception reliée au recepteur haute puissance qui permet de décoder le signal reçu et d'envoyer l'information au microprocesseur. Sur la seconde photo (à droite) se trouve la carte relais, qui permet d'amplifier l'information électrique envoyé par la carte mère après le traitement de l'information reçue par l'antenne afin de donner une puissance électrique suffisante à faire tourner les quatres moteurs placées dans les roues. Les fils rouges sortant de la base par un trou sont les fils reliés aux quatres moteurs des roues.


Ces deux photos représentent d'un côté l'arrière du robot (à gauche) et d'un autre la radiocommande (à droite). Deux cartes sont installés à l'arrière du robot : la carte d'alimentation utilisée pour brancher les batteries, qui serviront à fournir au système entier l'énergie électrique nécessaire au fonctionnement de tout le système, et la carte des masses qui regroupe toutes les masses électriques, c'est à dire qui sert de branche de référence des potentiels électriques du circuit le plus souvent égale à 0V. Par la masse passe toute l'énergie électrique indésirable. Elle protége des défauts d'isolement car l'électricité cherche a retourner vers le potentiel 0V si il n'y a pas de masse elle utilise votre corps pour retourner a la terre.
Réalisation SolidWorks